6 Convenient Functions
6.4 Parallel Shift Job Conversion Function
6-30
155507-1CD
RE-CSO-A037
DX100
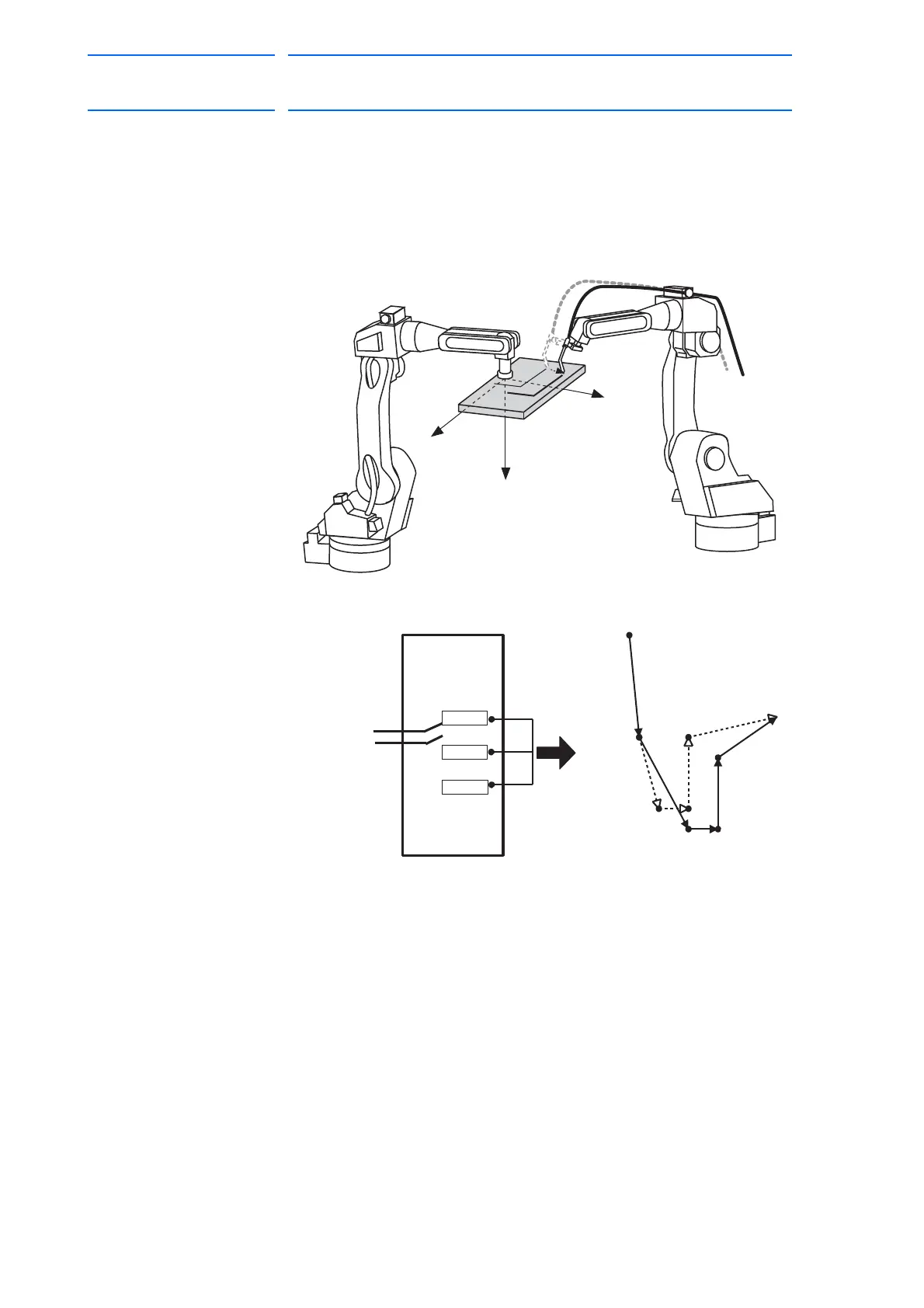
Converting R*+R* Jobs with Master Tool Coordinates
R*+R* coordinated jobs can be subjected to the parallel shift job
conversion in the master tool coordinates. Only the steps taken at the
“slave” from the standpoint of the SMOV instruction are subject to
conversion (i.e. the steps of R2 in the figure below).
R1 (Master)
R2 (Slave)
Y-axis
Z-axis
X-axis
Master tool coordinates
0001 MOV
+MOV
0002 MOV
+MOV
0003 SMOV
+MOV
0004 SMOV
+MOV
0005 SMOV
+MOV
0006 MOV
+MOV
1
2
3
4
5
6
Motion path
after conversion
Displays R2
Displays R1

 Loading...
Loading...









