6-29
155507-1CD
RE-CSO-A037
DX100
6 Convenient Functions
6.4 Parallel Shift Job Conversion Function
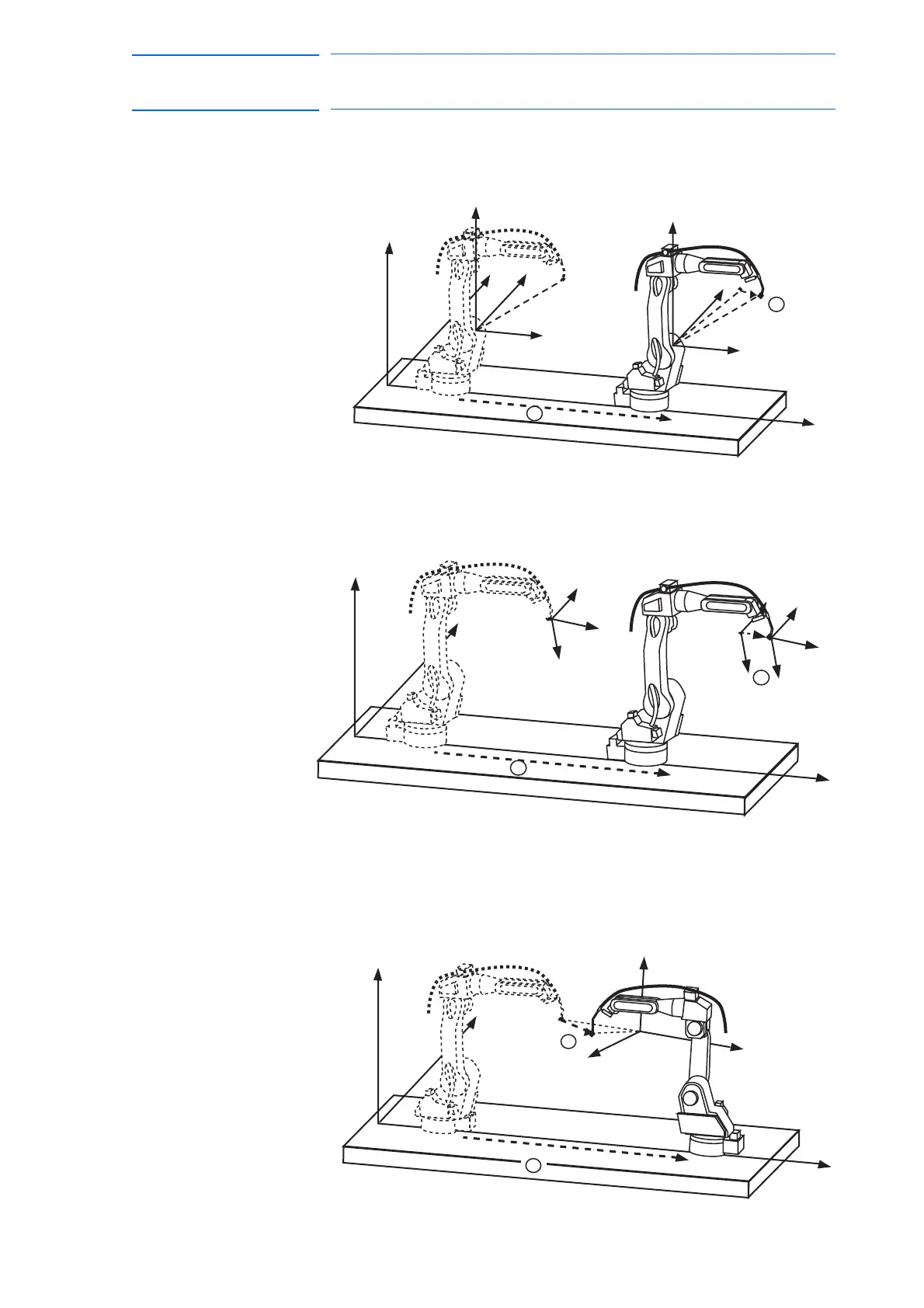
2. Robot Coordinates
The base axis is shifted by B. The TCP of the manipulator is shifted by
A in the robot coordinates. These shifts are carried out independently.
3. Tool Coordinates
The base axis is shifted by B and the TCP of the manipulator is shifted
by A in the tool coordinates. These shifts are carried out independently.
4. User Coordinates
The base axis is shifted by B and the TCP of the manipulator is shifted
by A in the user coordinates. These shifts are carried out
independently.
Base coordinates
A
B
Robot coordinates
Base coordinates
A
B
Tool coordinates
A
B
Base coordinates
User coordinates

 Loading...
Loading...









