9-12
155507-1CD
RE-CSO-A037
DX100
9 General Purpose Application
9.1 Simplified Teaching and Playback
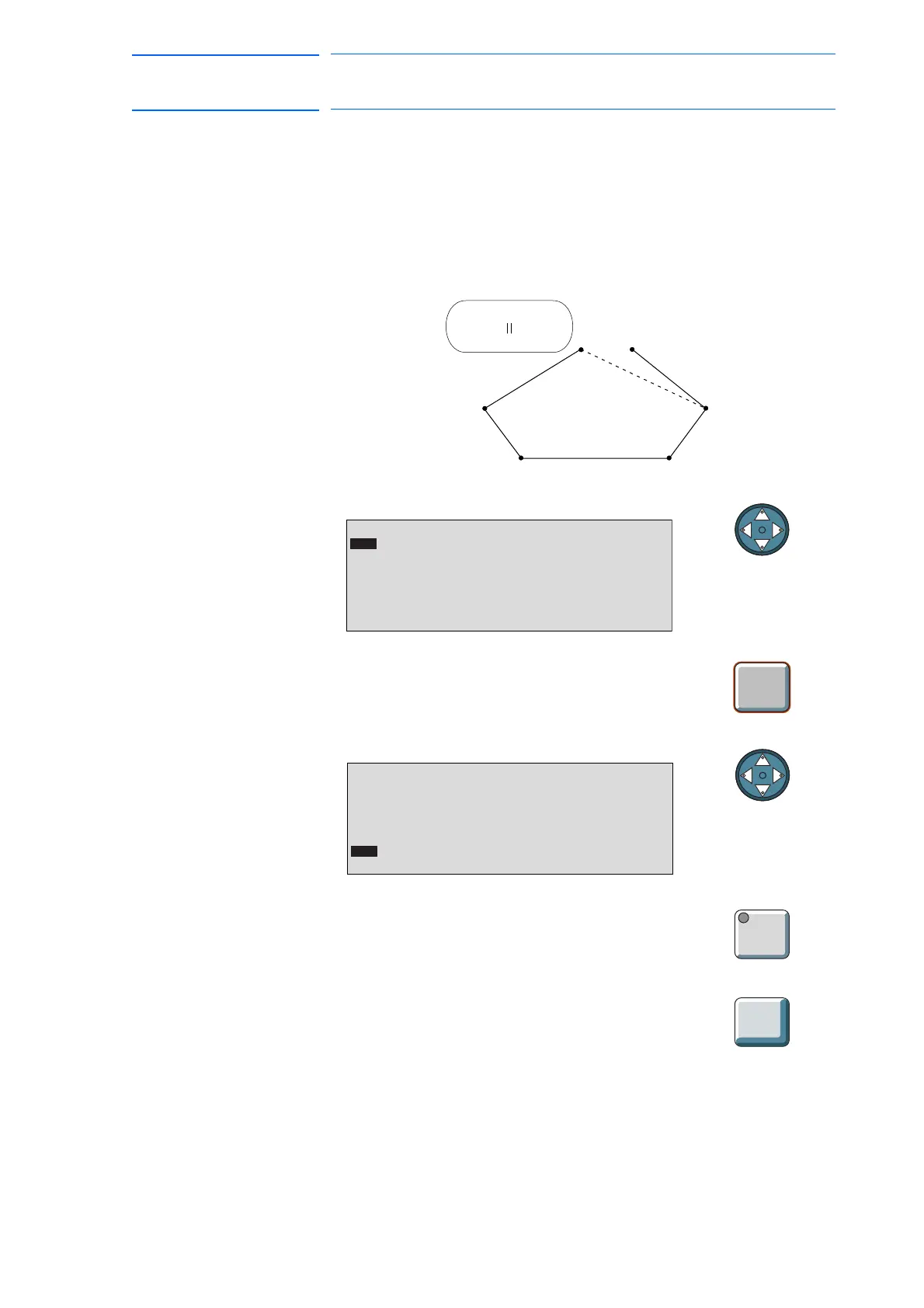
Ensuring the First and Last Step are Identical
The manipulator has stopped at Step 6, which should be very close to
Step1.
It is possible to move directly from the job end position of Step 5 to Step1,
so the manipulator can begin the next job quickly and efficiently.
The following operation will make Step 6 (end position) and Step1
(standby position) identical.
1. Move the cursor to Step1 (Line 0001).
2. Press [FWD]. The manipulator will move to
S
tep1.
3. Move the cursor to Step 6 (Line 0006).
4. Press [MODIFY].
5. Press [ENTER]. This will change the position of
S
tep 6 to be the same as Step1.
Step 2
Step 3 Step 4
Step 5
Corrent Step 6
Modified Step 6
Step 1
0000 NOP
0001 MOVJ VJ=50.00
0002 MOVJ VJ=50.00
0003 MOVJ VJ=12.50
0004 MOVL V=138
0005 MOVJ VJ=50.00
0006 MOVJ VJ=50.00
0007 END
0000 NOP
0001 MOVJ VJ=50.00
0002 MOVJ VJ=50.00
0003 MOVJ VJ=12.50
0004 MOVL V=138
0005 MOVJ VJ=50.00
0006 MOVJ VJ=50.00
0007 END

 Loading...
Loading...









