General-purpose timers (TIM15/TIM16/TIM17) RM0444
770/1390 RM0444 Rev 5
The following procedure must be followed to re-arm the protection after a break event:
• The BKDSRM bit must be set to release the output control
• The software must wait until the system break condition disappears (if any) and clear
the SBIF status flag (or clear it systematically before re-arming)
• The software must poll the BKDSRM bit until it is cleared by hardware (when the
application break condition disappears)
From this point, the break circuitry is armed and active, and the MOE bit can be set to re-
enable the PWM outputs.
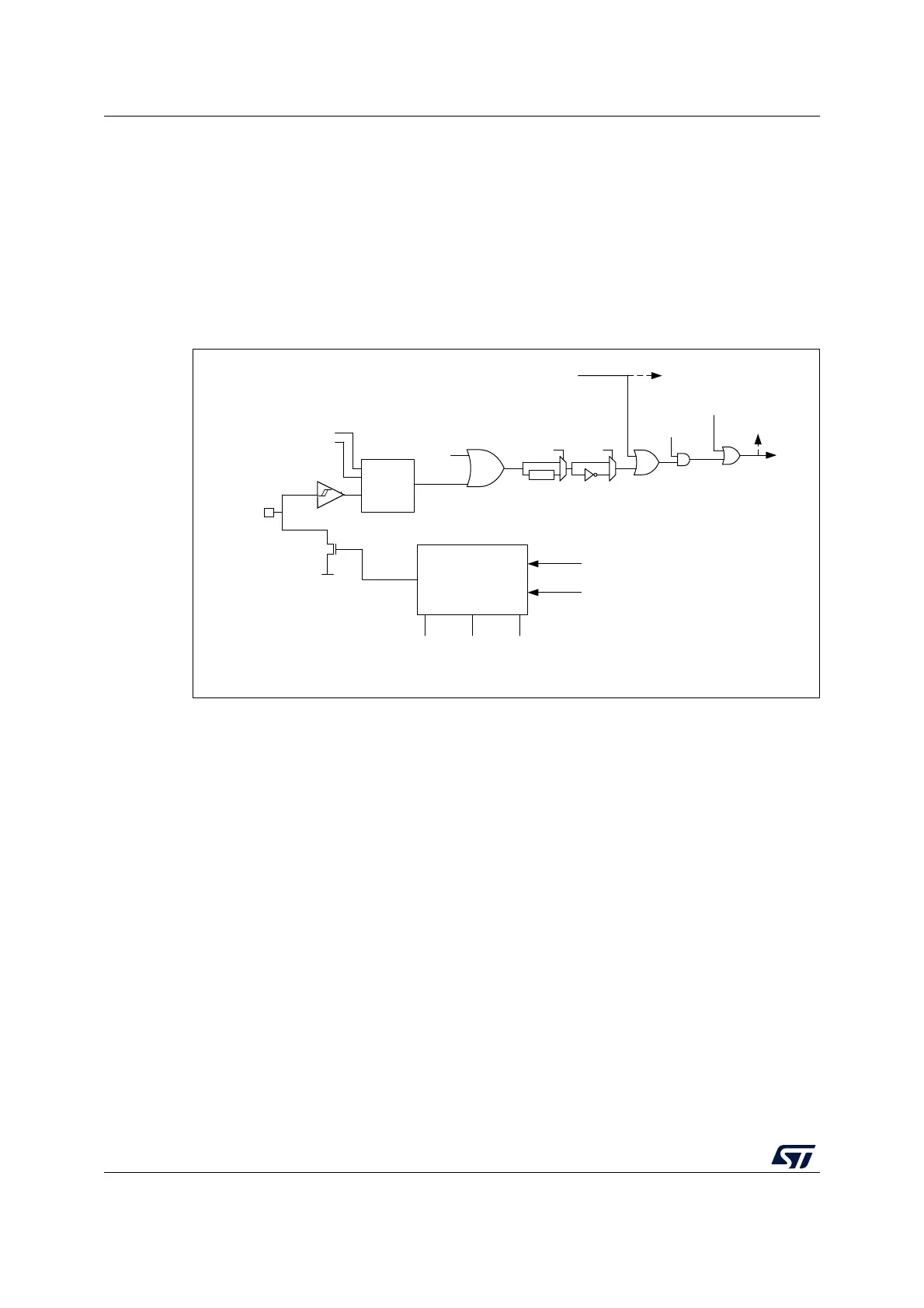
Figure 263. Output redirection
MSv42028V2
BKIN inputs from
AF controller
BKF[3:0]
Filter
BKP
BKE
BRK
request
BIF flag
SBIF flag
System break request
Peripheral
break sources
AF
controller
mode control logic
MOE BKBID BKBDSRM
BRK request
System break request
Bidirectional
Break I/O
Other break inputs
Application break requests
Vss
Bidirectional
AF input
(active low)
AF output
(open drain)
Software break
requests: BG
 Loading...
Loading...




