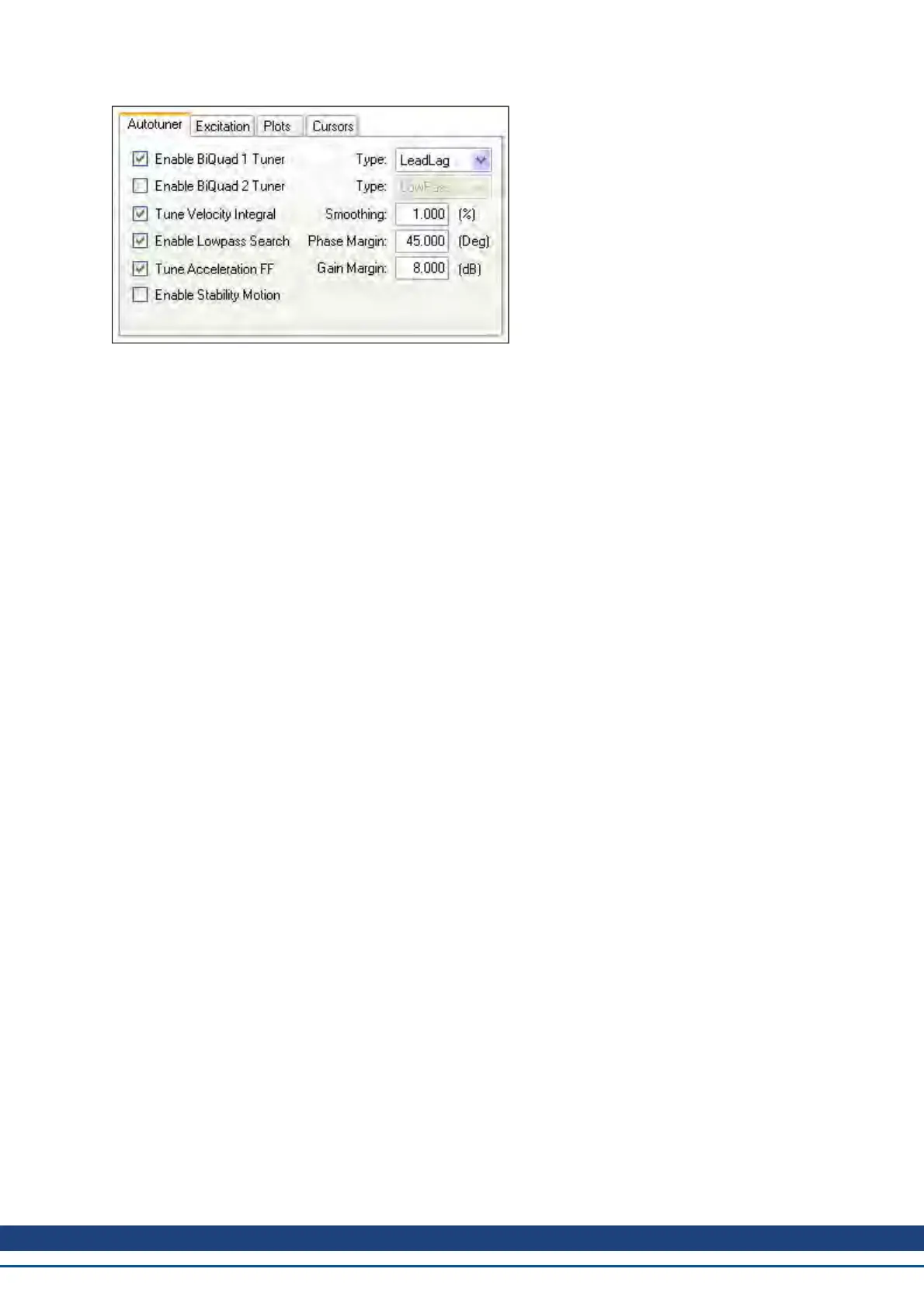
Enable BiQuad 1 Tuner
Check this box to use the first anti-resonance filter in the forward path (AR1). You can specify the type of filter to
use in the Type box to the right of Enable BiQuad 1 Tuner.
Enable BiQuad 2 Tuner
Check this box to use the second anti-resonance filter in the forward path (AR2). You can specify the type of
filter to use in the Type box to the right of Enable BiQuad 2 Tuner. Enabling this option may significantly slow
your computer during this operation.
Biquad Type
For Biquad 1 and 2, you can choose what type of filter to implement. The four options are:
1. LeadLag: The LeadLag filter is the default, and will work for most servo systems.
2. Lowpass: A Lowpass filter requires the least amount of processing time. The autotuner will place the low-
pass to get the maximum bandwidth possible.
3. Resonator: The Resonator filter is like a Notch filter with tunable bandwidth and notch depth. The Res-
onator takes longer to calculate than the LeadLag filter.
4. Custom: The Custom filter takes the longest to calculate and does not restrict the Autotuner to a filter
shape. This filter type provides excellent results, but may significantly slow your computer while the filter
is calculated.
Tune Acceleration FF
This box turns on and off the acceleration feedforward tuner. If this box is checked, the Autotuner will measure
the inertia attached to the motor shaft, and using this measurement, will calculate an appropriate acceleration
feedforward and write it to the drive (IL.KACCFF)
Enable Stability Motion
When this checkbox is checked, after the Autotuner has completed, the Autotuner will command a short move in
the clockwise direction, then back to its origin and monitor the motor's parameters to determine if the tuning is
stable. If an instability is detected, the drive will generate Fault 133: Instability during Autotune.
Phase and Gain Margins
The autotuner always ensures that the tuning satisfies stability criteria that can be adjusted in units of phase mar-
gin (in degrees) and gain margin (in dB). The Autotuner uses default values for phase and gain margin, but you
can adjust these values to ensure higher stability or to allow the autotuner to be more aggressive by using lower
gain and phase margins.
AKD User Guide | 14 Tuning Your System
Kollmorgen | December 2010 151

 Loading...
Loading...








