AKD User Guide | MT Parameters and Commands
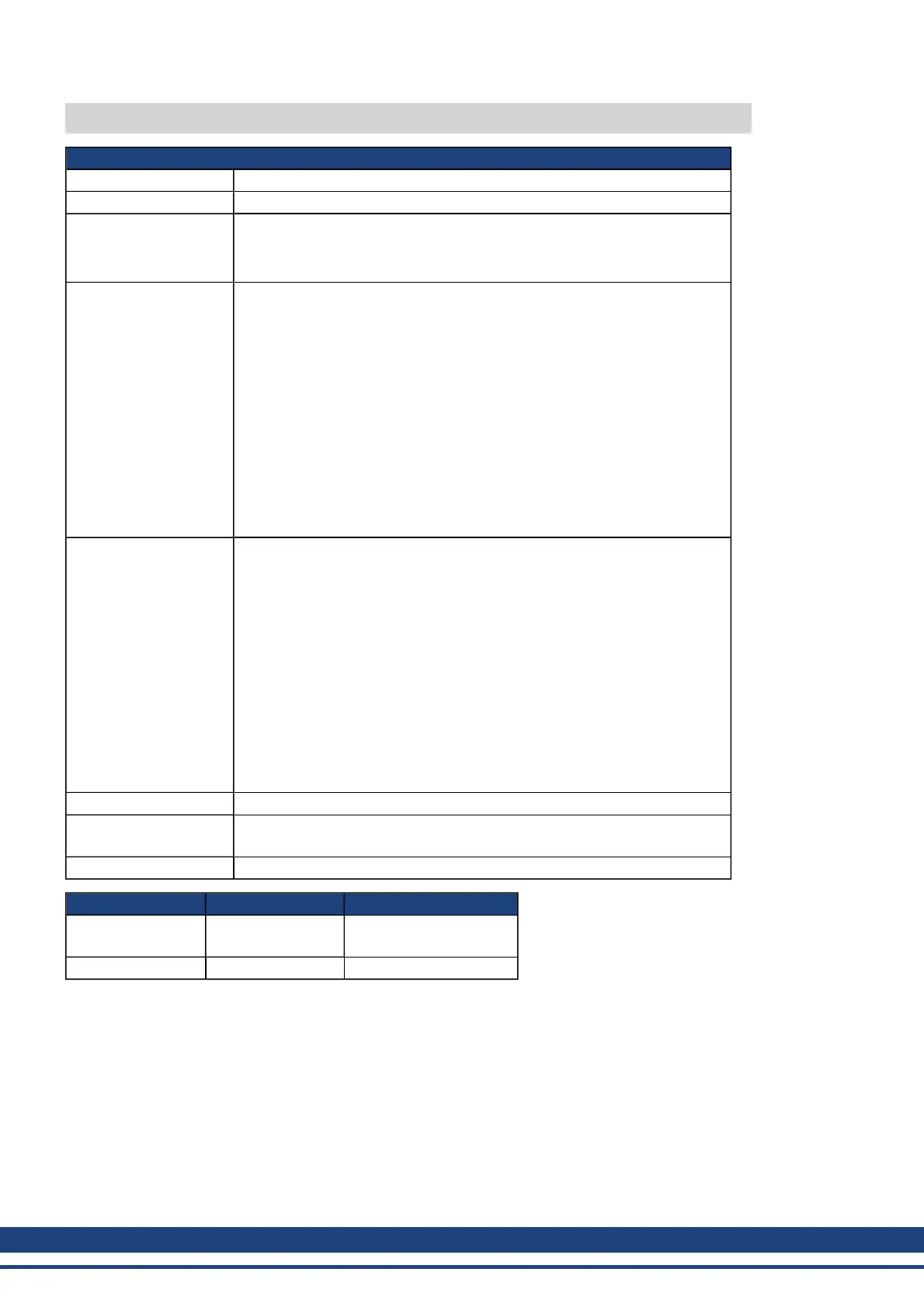
MT.DEC
General Information
Type R/W Parameter
Description Sets motion task deceleration; active in opmode 2 (position) only.
Units
Depends on UNIT.ACCROTARY or UNIT.ACCLINEAR
Rotary: rps/s, rpm/s, deg/s², (PIN/POUT)/s², rad/s²
Linear: counts/s², mm/s², µm/s², (PIN/POUT)/s²
Range
Rotary:
0.031 to 833333.333 rps/s
1.860 to 50000000.000 rpm/s
11.158 to 300000000.000 deg/s²
0.155 to 4166666.752 (PIN/POUT)/s²
0.195 to 5235987.968 rad/s²
Linear:
0.000 to 833.333 counts/s²
0.031*MOTOR.PITCH to 833333.333*MOTOR.PITCH mm/s²
30.994*MOTOR.PITCH to 833333333.333*MOTOR.PITCH µm/s²
0.155 to 4166666.667 (PIN/POUT)/s²
Default Value
Rotary:
166.714 rps/s
10,002.851 rpm/s
60.017.108 deg/s²
833.571 (PIN/POUT)/s²
1,047.496 rad/s²
Linear:
0.166 counts/s²
166.714*MOTOR.PITCHMOTOR.PITCH mm/s²
166,714.191*MOTOR.PITCHMOTOR.PITCH µm/s²
833.571 (PIN/POUT)/s²
Data Type Float
See Also
MT.ACC, MT.NUM , MT.P, MT.V, MT.CNTL, MT.TNUM, MT.MTNEXT
, MT.TNEXT, MT.SET , MT.LOAD
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
6084h/0 M_01-00-00-000
Modbus 536 (64-bit) M_01-03-00-000
Description
MT.DEC specifies the motion task deceleration and is used by the MT.SET and MT.LOAD commands. This
parameter is a temporary value, since a motion task is only set after an MT.SET command is issued. The motion
task deceleration is further limited by the maximum allowed acceleration, DRV.DEC.
A value of 0 for MT.DEC should not be used when setting a motion task via MT.SET because this value causes
a validity check of the MT.SET command to fail.
A value of 0 for MT.DEC after an MT.LOAD command displays an empty (not initialized) motion task.
Related Topics
520 Kollmorgen | December 2010
 Loading...
Loading...









