AKD User Guide | 10 Configuring General Drive Settings
10.7 Electronic Gearing
10.7.1 Overview
Electronic gearing is the act of sending a digital pulse position command to the AKD drive. The X9 connector is
used for controlling the drive through an A/B type signal, pulse and direction (also called step and direction), or
up/down command. A common application for electronic gearing is using servos with a stepper controller or daisy
chaining multiple AKD drives from one master drive as slave drives.
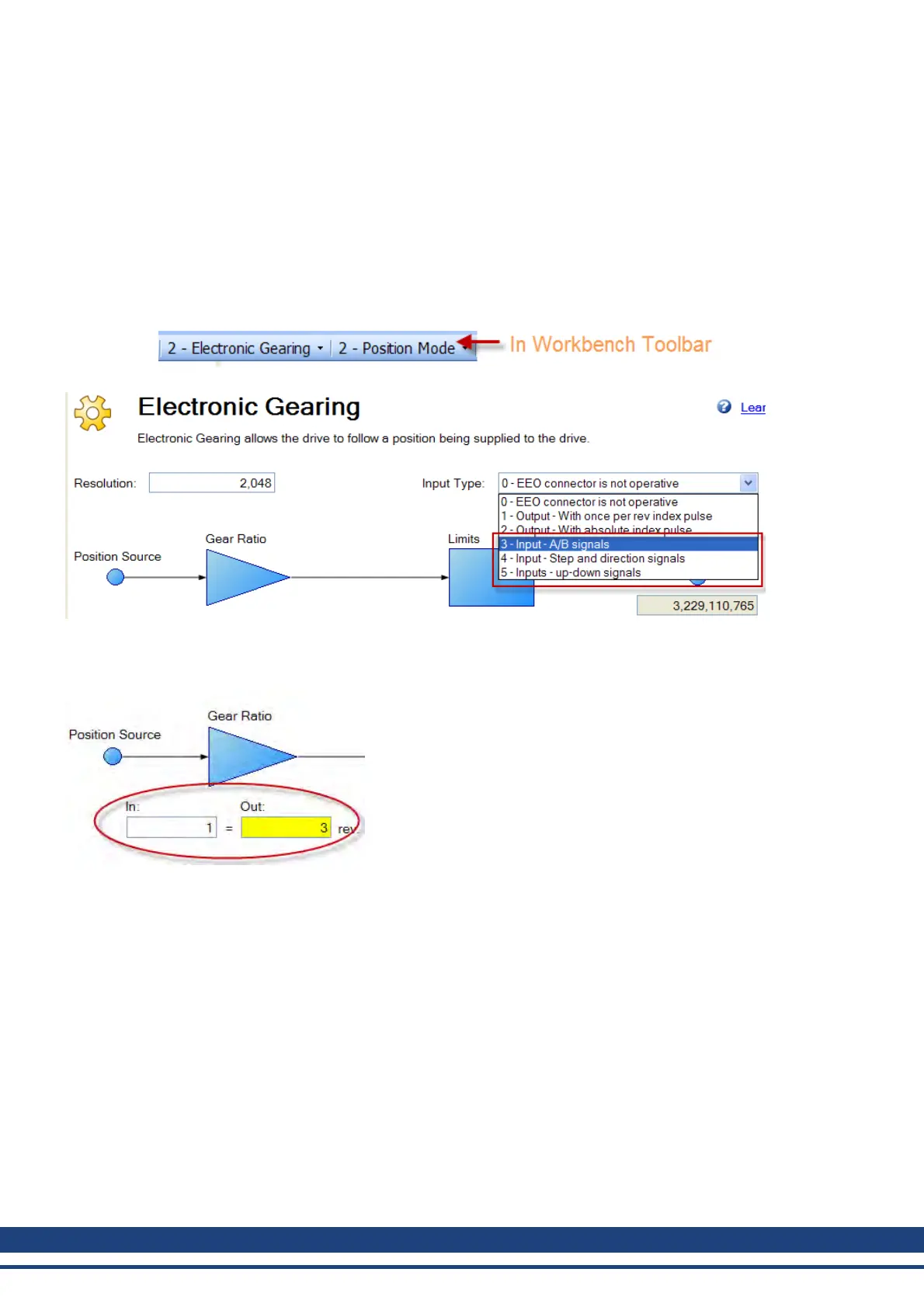
In order to command an AKD using electronic gearing, the command source (DRV.CMDSOURCE) must be set
to 2-Electronic Gearing and the opmode (DRV.OPMODE) must be set to 2-Position Mode.
The input modes of the X9 connector are used to set up the AKD for electronic gearing.
Only input modes 3,4, and 5 pertain to electronic gearing input.
Resolution is the post-quadrature value of the counts/revolution of the input. Additionally, a gear ratio can be
applied to affect the output ratio of the motor.
The position command (DRV.HANDWHEEL) reads the EEO value, where 4,294,967,296 is a full revolution of
the input, then the value rolls over. Gear ratio does not affect the EEO value. If the output is set to 3 output revs
per input rev, there will be 4,294,967,296 counts per 3 revolutions of the motor.
10.7.2 Limits
Electronic Gearing has independent limits, as shown below:
98 Kollmorgen | December 2010
 Loading...
Loading...









