AKD User Guide | VL Parameters
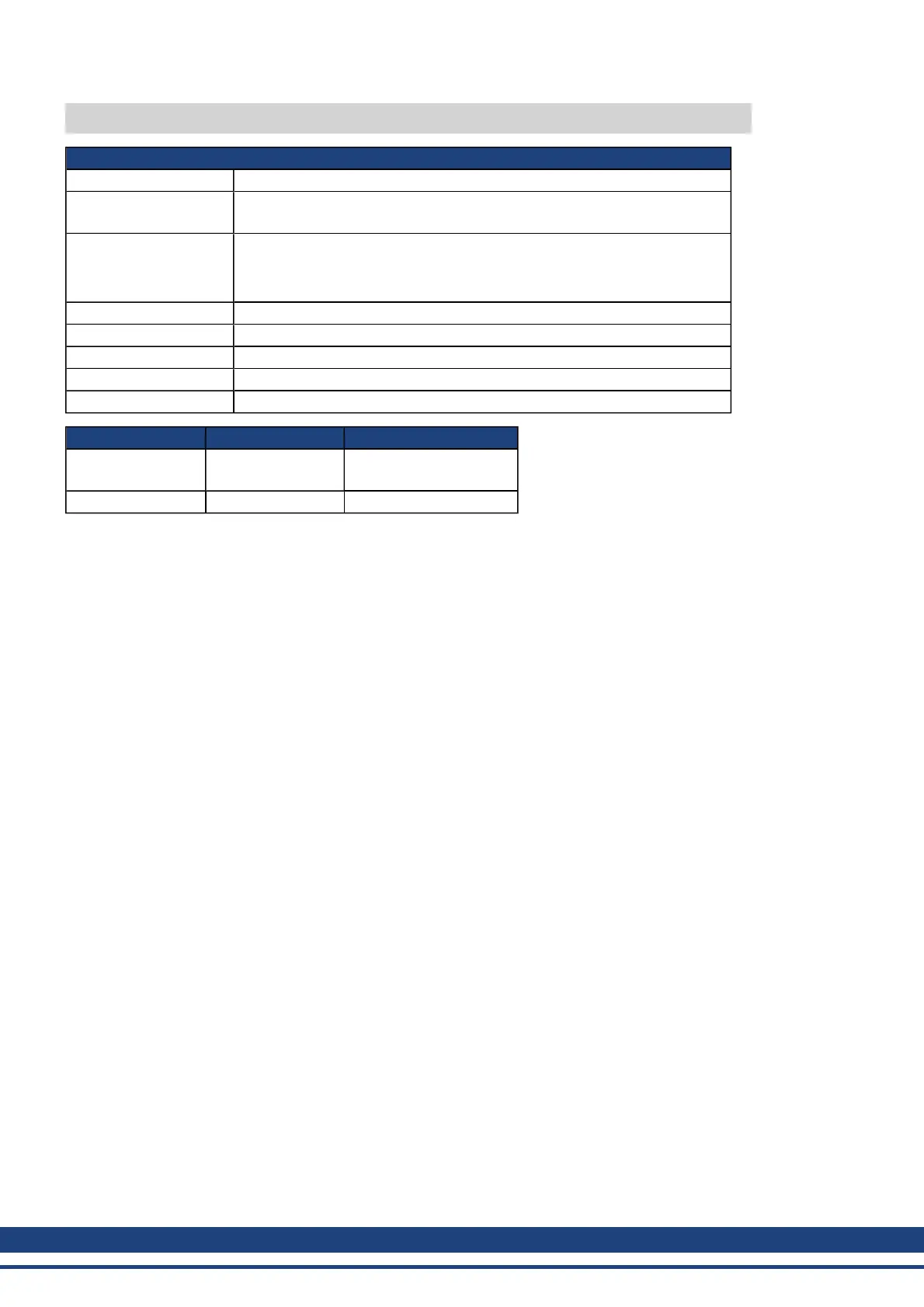
VL.CMD
General Information
Type R/O Parameter
Description
Reads the actual velocity command; active in opmodes 1 (velocity) and 2
(position) only.
Units
Depends on UNIT.VROTARY or UNIT.VLINEARUNIT.ACCLINEAR
Rotary: rpm, rps, deg/s, (PIN/POUT)/s, rad/s
Linear: counts/s, mm/s, µm/s, (PIN/POUT)/s
Range N/A
Default Value N/A
Data Type Float
See Also VL.FB, VL.CMDU, VL.LIMITP, VL.LIMITN
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
606Bh/0 M_01-00-00-000
Modbus 850 M_01-03-00-000
Description
VL.CMD returns the actual velocity command as it is received in the velocity loop entry after all velocity limits
(such as VL.LIMITN and VL.LIMITP). See velocity loop design diagram for more details.
Related Topics
10.4 Analog Input
11.4 Velocity Loop
11.5 Position Loop
Block Diagrams
630 Kollmorgen | December 2010

 Loading...
Loading...






