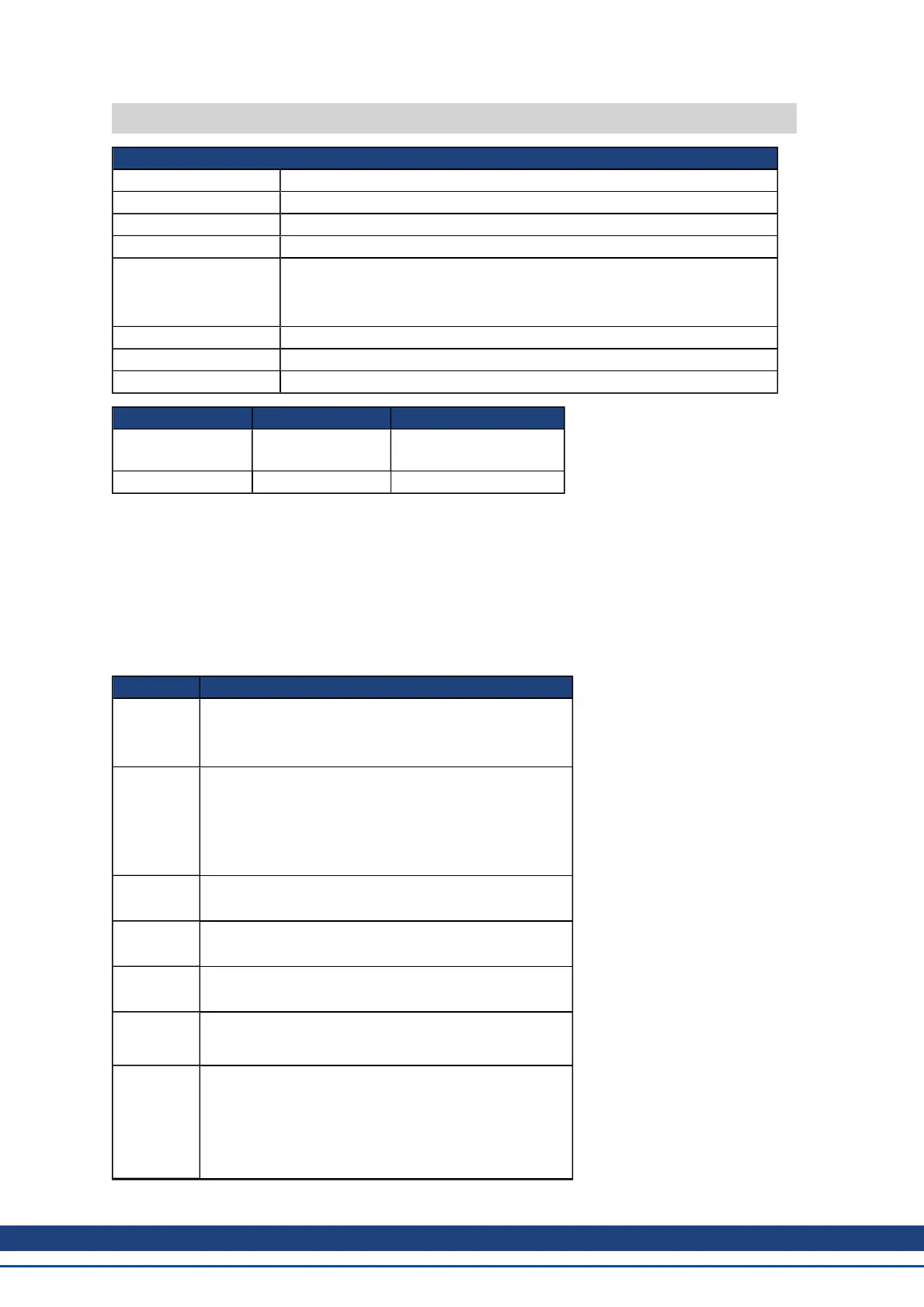
WS.STATE
General Information
Type R/O Parameter
Description Reads wake and shake status
Units N/A
Range N/A
Default Value
Only valid before the first enable happens.
0 - for feedback types that do not require wake and shake
1 - for feedback types that require wake and shake
Data Type U8
See Also N/A
Start Version M_01-01-00-101, M_01-02-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
3494h/5 M_01-00-00-000
Modbus 906 M_01-03-00-000
Description
WS.STATE 0 = wake and shake successful or not configured.
WS.STATE 1 = wake and shake configured and will be done at next enable.
WS.STATE 2 and higher = wake and shake running.
Overview of the mode 0 states:
State Description
1
- Waiting for drive enable
- save original settings
- switch to current mode
2
- wait 100ms before continuing
- activate real-time (RT) functions
RT will switch different current vectors and record posi-
tion feedback. WS.T and WS.TDEL1 are used for RT
switching of current vectors.
3
- wait for RT to finish
- calculate coarse angle from RT data
4
- wait WS.TDEL2 before continuing
- switch to velocity mode
5
- wait 10ms before continuing
- activate RT current feedback filtering
6
- ramp up D-Current up to 75% of WS.IMAX
- execute angle fine calculation
7
- check if difference between coarse and fine cal-
culation is lower than 30°, else generate fault "Wake
and Shake.Fine-Coarse delta too big."
- if this was not the last loop switch to current mode and
go to 2
AKD User Guide | WS Parameters
Kollmorgen | December 2010 655
 Loading...
Loading...









