AKD User Guide | MT Parameters and Commands
MT.P
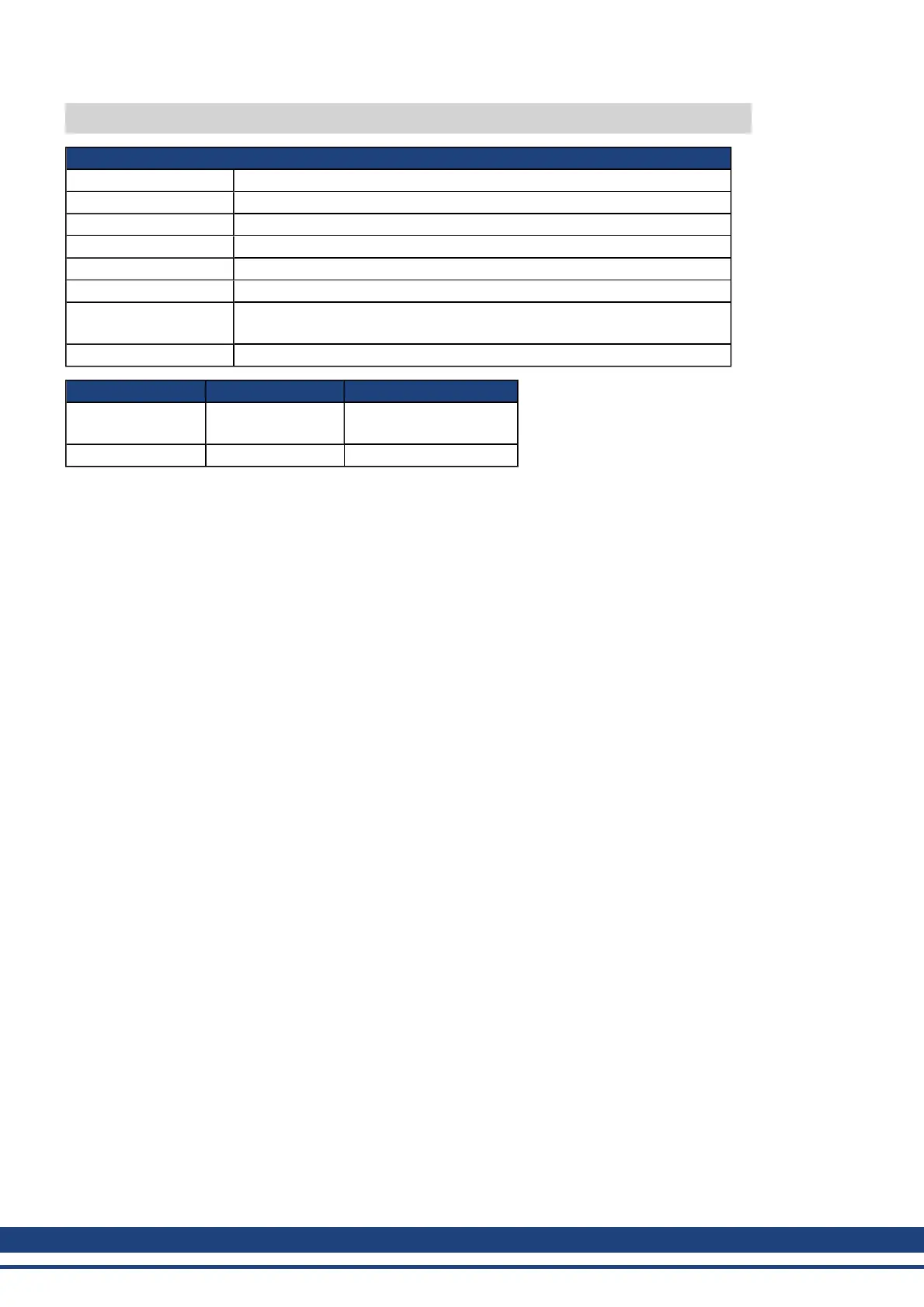
General Information
Type R/W Parameter
Description Sets the motion task position; active in opmode 2 (position) only.
Units Depends on UNIT.PROTARY or UNIT.PLINEAR
Range N/A
Default Value 0
Data Type Float
See Also
MT.NUM , MT.V, MT.CNTL, MT.ACC, MT.DEC, MT.TNUM,
MT.MTNEXT , MT.TNEXT, MT.SET , MT.LOAD
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
607Ah /0 M_01-00-00-000
Modbus 550 (64-bit) M_01-03-00-000
Description
MT.P specifies the motion task position, which is used by the MT.SET and MT.LOAD command. Depending on
the motion task control word (MT.CNTL), the MT.P command can either be the target position of the motion task
or a relative distance. This parameter is a temporary value. A motion task is only set after an MT.SET command.
Related Topics
12.2 Motion Tasks
528 Kollmorgen | December 2010
 Loading...
Loading...









