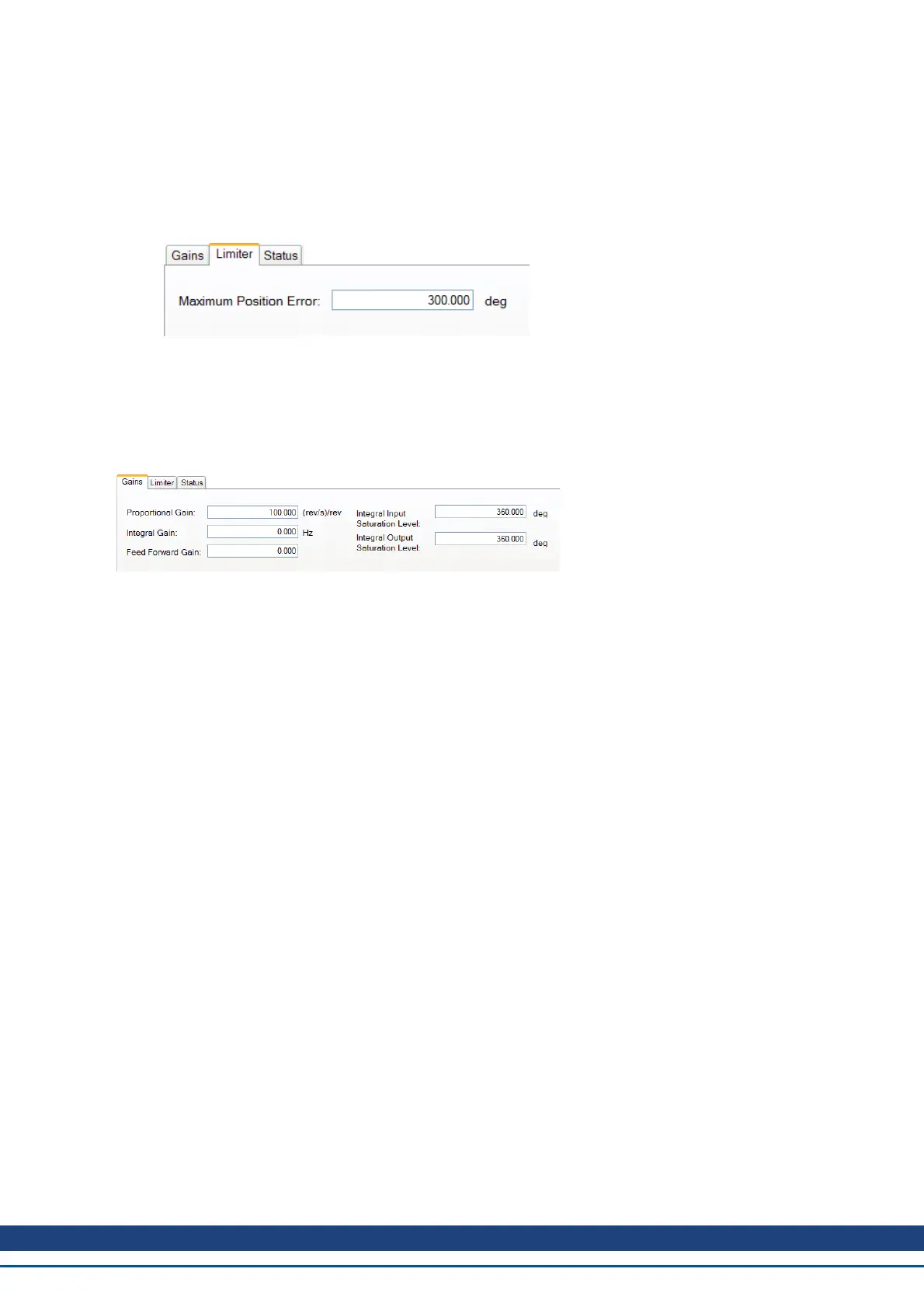
l Gains. This tab shows the gains for the position loop.
l Limiter. The value in the Maximum Position Error box (PL.ERRFTHRESH) limits the position error
(PL.ERR) that can be present. When the maximum position error is exceeded, the drive generates fault
439, Following Error. If the maximum position error is set to 0 (default) then the maximum position error is
ignored.
l Status. This tab shows the present value of commanded position (PL.CMD), position feedback (PL.FB ),
position error (PL.ERR), and velocity command (VL.CMD).
11.5.3 Position Loop Default Behavior and Changes
By default, only a proportional gain (PL.KP) is applied in the position loop.
11.5.3.1 Position Loop Changes Based on Slider Tuning
Slider Tuning (see 14.1 Slider Tuning) adjusts the proportional gain of the position loop (along with velocity loop
view parameters; see 11.4 Velocity Loop). If you adjust the bandwidth using the slider tuner, then when you
return to the position loop screen, you will see a change to the proportional gain only. No adjustment is made to
the integral gain or feedforward gain through the slider tuner. The integral saturation levels are not applicable
when the integral gain is set to 0. In the Gains tab, the boxes for these values may be populated with default
values whether or not the integral gain is set to 0.
11.5.3.2 Position Loop Changes Based on Autotuner
When the Autotuner (see 14.3 Using the Autotuner) is used in Autotune mode, changes are made to the position
loop proportional gain, integral gain, feedforward gain and other parameters not related to the Position Loop view
directly. The values adjusted are dependent on the drive, motor, load, and the autotuner settings.
Related Parameters
PL Parameters
DRV.OPMODE
VL.CMD
AKD User Guide | 11 Using Command Source and Operating Modes
Kollmorgen | December 2010 117

 Loading...
Loading...








