AKD User Guide | FB1 Parameters
FB1.ORIGIN
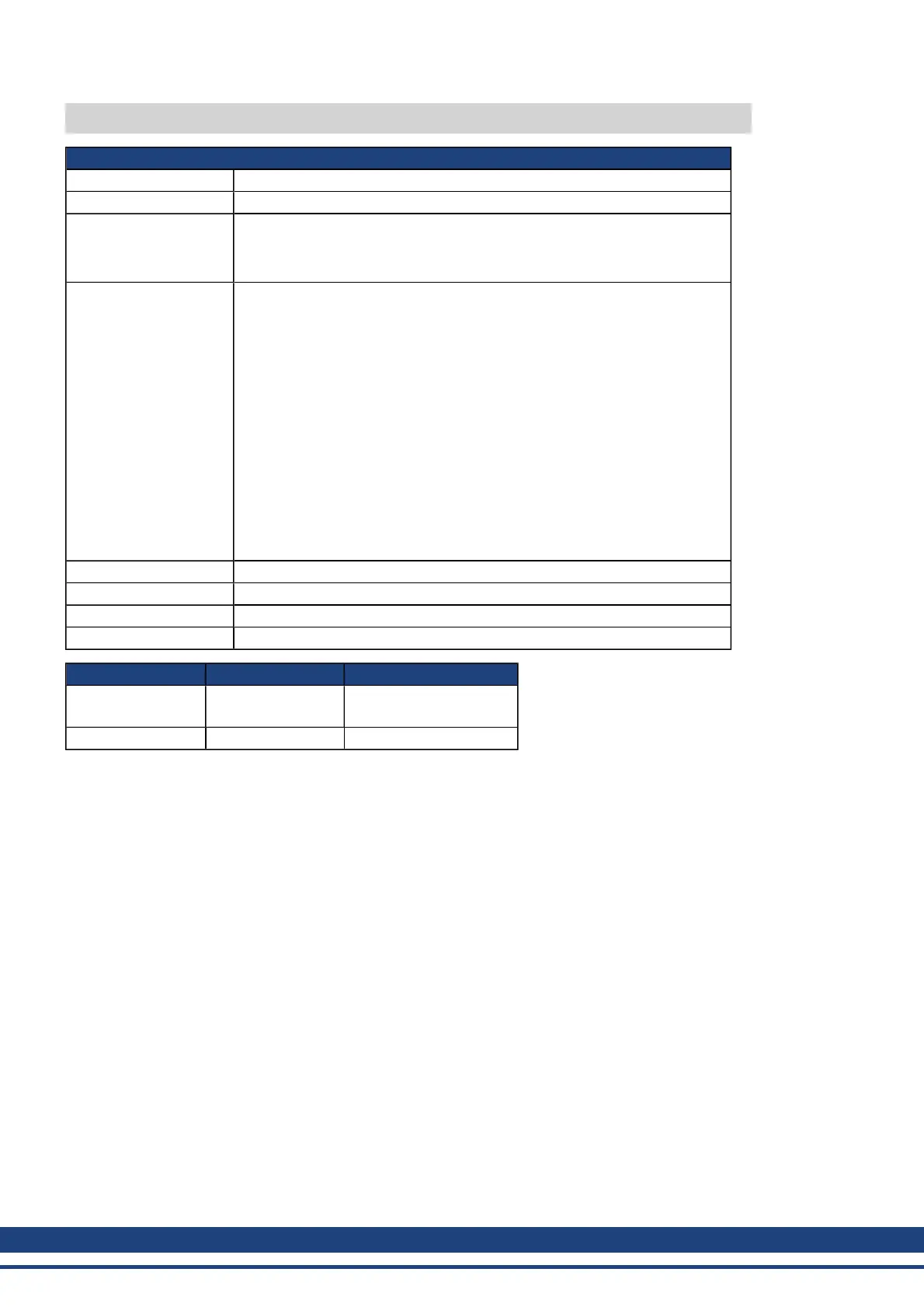
General Information
Type NV Parameter
Description Adds to the initial feedback position.
Units
Depends on UNIT.ACCROTARY or UNIT.ACCLINEAR
Rotary: counts, rad, deg, PIN/POUT, 16-bit counts
Linear: counts, mm, µm, PIN/POUT, 16-bit counts
Range
Rotary:
0.000 to 5,123,372,000,000.000 counts
0.000 to 7,495.067 rad
0.000 to 429,436.096 deg
0.000 to 5,964.390 PIN/POUT
0.000 to 78,176,452.636 16-bit counts
Linear:
0.000 to 5,123,372,000,000.000 counts
0.000 to 1,192.878 mm
0.000 to 1,192,877.952 µm
0.000 to 5,964.390 PIN/POUT
0.000 to 78,176,452.636 counts16 Bit
Default Value 0 counts
Data Type Float
See Also FB1.INITSIGNED
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
3656h/0 M_01-00-00-000
Modbus 294 (64-bit) M_01-03-00-000
Description
FB1.ORIGIN is a value that is added to the feedback device position. Initial value and modulo are determined
from the number of bits of the feedback:
Initial position value = ( <feedback from device> + FB1.ORIGIN ) modulo <number of feedback bits>
The number of feedback bits is set according to the feedback type. For memory feedbacks it is the number of
feedback bits; for none memory it is always single turn.
The drive internal process for the feedback initialization is as follows:
1. Reads the position feedback.
2. Adds the origin to the feedback.
3. Determines modulo from Step 2 by the actual feedback bits.
4. Sets the position feedback sign according to FB1.INITSIGNED.
Example
This example uses UNIT.PROTARY set to 2 (degrees)
It also assumes that the drive is connected to a single turn feedback device with memory.
FB1.ORIGIN is set to 22 and saved into NV memory.
406 Kollmorgen | December 2010

 Loading...
Loading...






