AKD User Guide | 12 Creating Motion
5. As soon as the switch is triggered, the motor will reverse direction and move to the zero angleof the
motor.
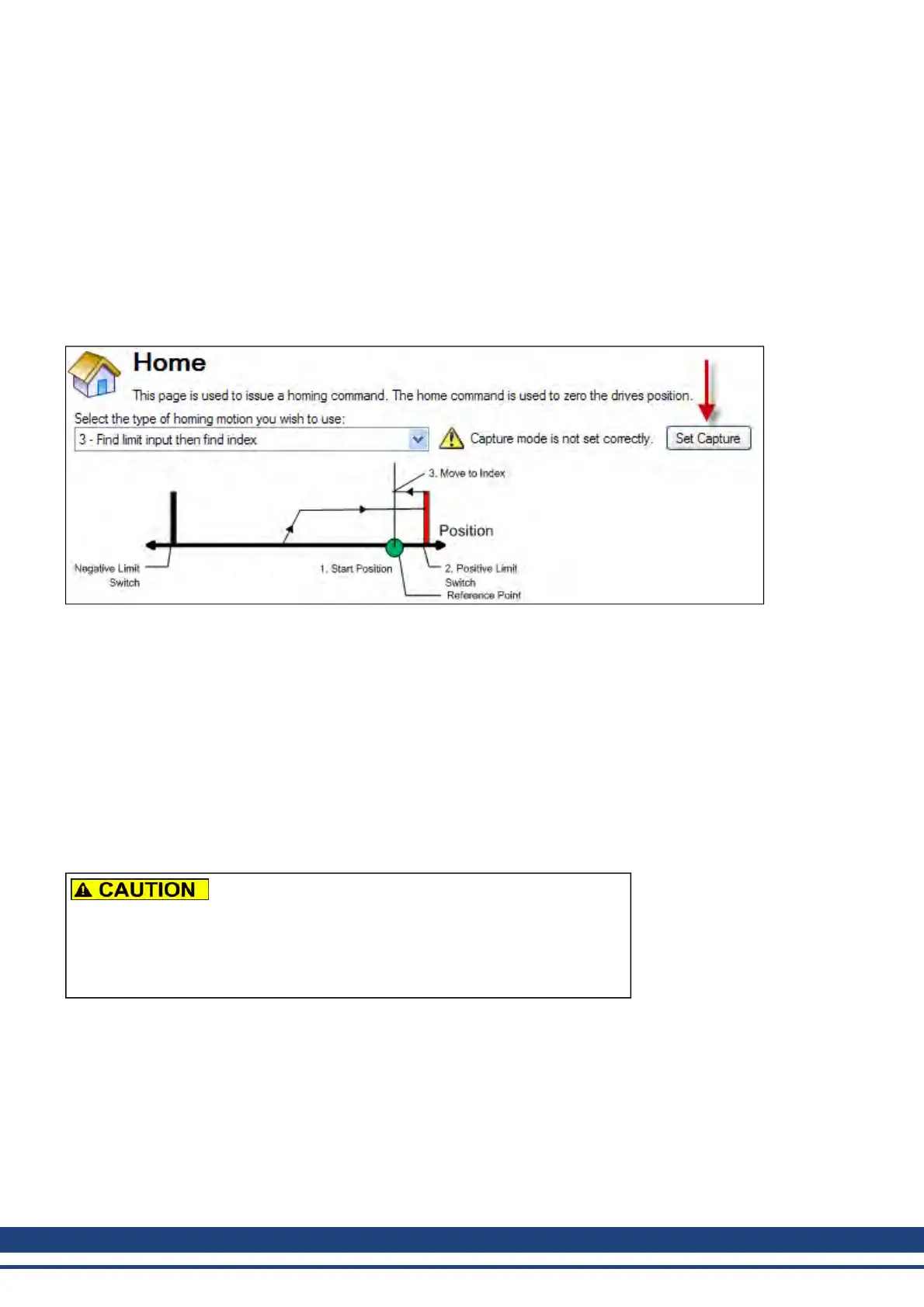
Homing Mode 3: Find Input Limit then Find Index
Similar to the Find Input Limit method, this follows the same steps, but upon completion of the move, it continues
to move to find the index pulse of the motor. This method can only be used with feedback devices that have an
index pulse such as incremental encoders and analog sine encoders with an index channel (Feedback selection
10, 11, 20, 21). This method requires that Capture Mode is turned on in the home screen. With Mode 3 selected,
a Set Capture button appears (see arrow below). Click Set Capture to set the Position Capture mechanism cor-
rectly for proper homing with an index pulse.
Once homing is triggered, the homing routine is performed as follows:
1. The motor starts to move according to the HOME.DIR setting.
2. The motor stops as soon as the hardware limit switch has been detected and changes direction of move-
ment.
3. The motor ramps down to a reduced velocity as soon as the hardware limit switch is no longer active
(please refer also to HOME.FEEDRATE). The drive is searching for the index-signal during this time.
The home-position has been found as soon as the index-signal has been detected by the drive.
4. The actual and the command position of the drive will be set to the HOME.P value as soon as the index
pulse is found. The drive then ramps down to velocity 0. The axis is then moved to the position (home.p)
+ distance offset (home.dist).
When homing to a limit switch, the limit switch must
remain in the triggered state while the motor decel-
erates to zero and begins to reverse. A very low accel-
eration rate combined with a high approach velocity
may overshoot the switch and cause it to become
active. This action will cause a homing error fault.
Homing Mode 3 Example
Use the positive end of travel limit as home reference, and then move to the index reference of the motor feed-
back device at 50% of the original home velocity.
1. Select Mode 3 from the drop down box.
2. Set the Direction to Positive.
3. In the Home screen click Set Capture.
4. Set the velocity factor to 50%.
124 Kollmorgen | December 2010

 Loading...
Loading...






