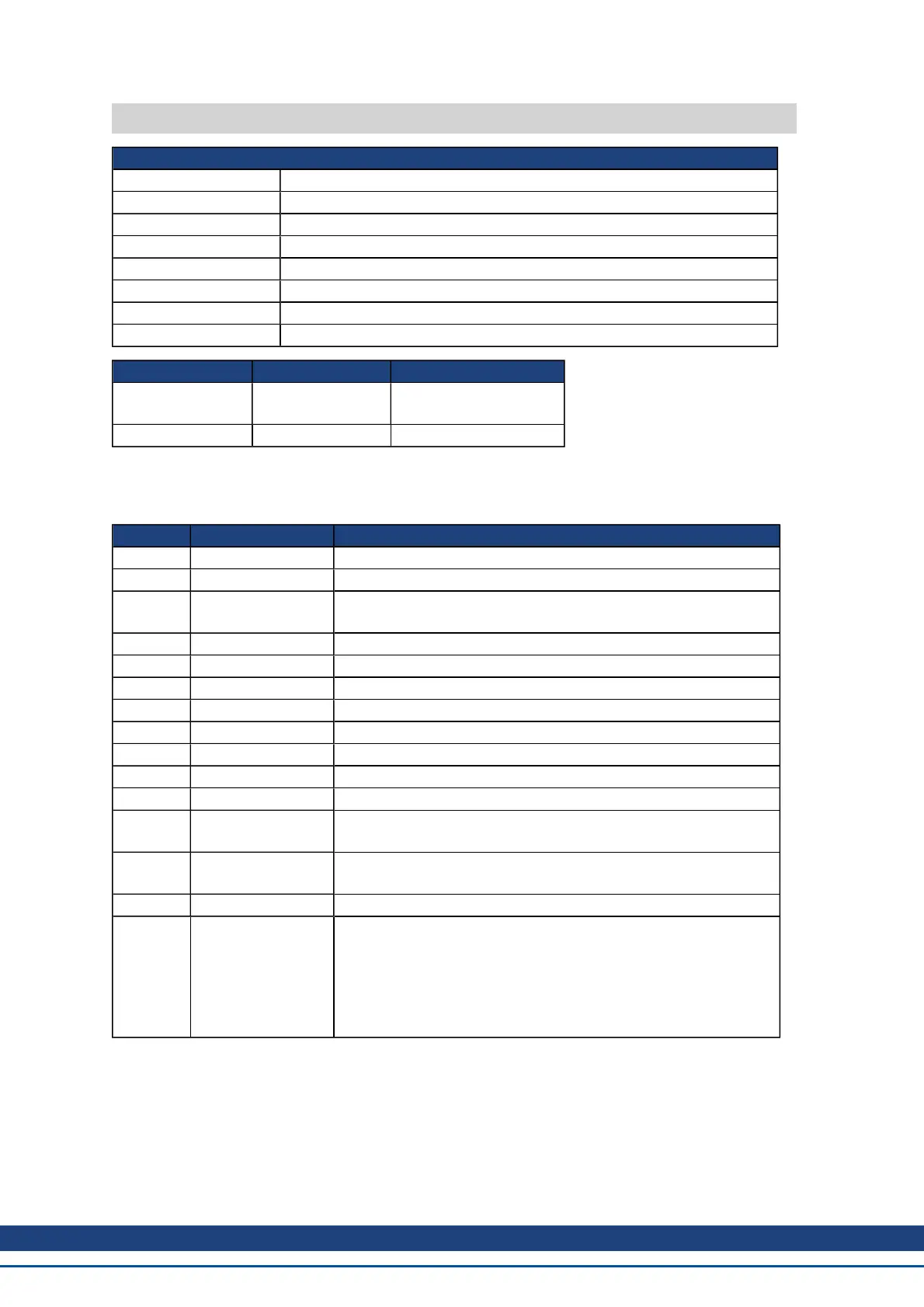
DRV.MOTIONSTAT
General Information
Type R/O Parameter
Description Reads the motion status of the drive.
Units N/A
Range 0 to 4,294,967,295
Default Value N/A
Data Type Integer
See Also N/A
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
3492h/0 M_01-00-00-000
Modbus 268 M_01-03-00-000
Description
This command indicates the current status of the drive internal motion (see table below).
Bit Significance Description
0 0x00000001 Motion task is active (high active)
1 0x00000002 Home position found /reference point set (high active)
2 0x00000004
Home routine finished (high active). Bits 1 and 2 both must be set
to confirm that the homing process is complete.
3 0x00000008 Homing active (high active)
4 0x00000010 Homing error condition has occurred (high active)*
5 0x00000020 Slave in electronic gearing mode synchronized (high active)
6 0x00000040 Electronic gearing is active (high active)
7 0x00000080 Emergency stop procedure in progress (high active)
8 0x00000100 Emergency stop procedure has an error (high active)
9 0x00000200 Service motion active (high active)
10 0x00000400 A motion task could not be activated /invalid MT (high active)**
11 0x00000800
Motion task target position has been reached. See also
MT.TPOSWND (high active).
12 0x00001000
Motion task target velocity has been reached. See also
MT.TVELWND (high active).
13 0x00002000 The Bode plot procedure within the drive is active (high active).
14 0x00004000
The target position of a motion task has been crossed. This sit-
uation occurs for motion tasks with a change on the fly when trig-
gering the DRV.STOP command just before the reaching the
target velocity of the current active motion task. The ramp-down
procedure with the motion task deceleration ramp causes the tar-
get position to be crossed (high active).
* A possible error condition for homing to a reference switch could be that no reference switch was found
between two hardware limit switches.
** A possible error condition for an invalid motion task could be that a motion task tried to trigger automatically fol-
lowing motion task that has never been initialized (called an "empty motion" task).
AKD User Guide | DRV Parameters and Commands
Kollmorgen | December 2010 379

 Loading...
Loading...






