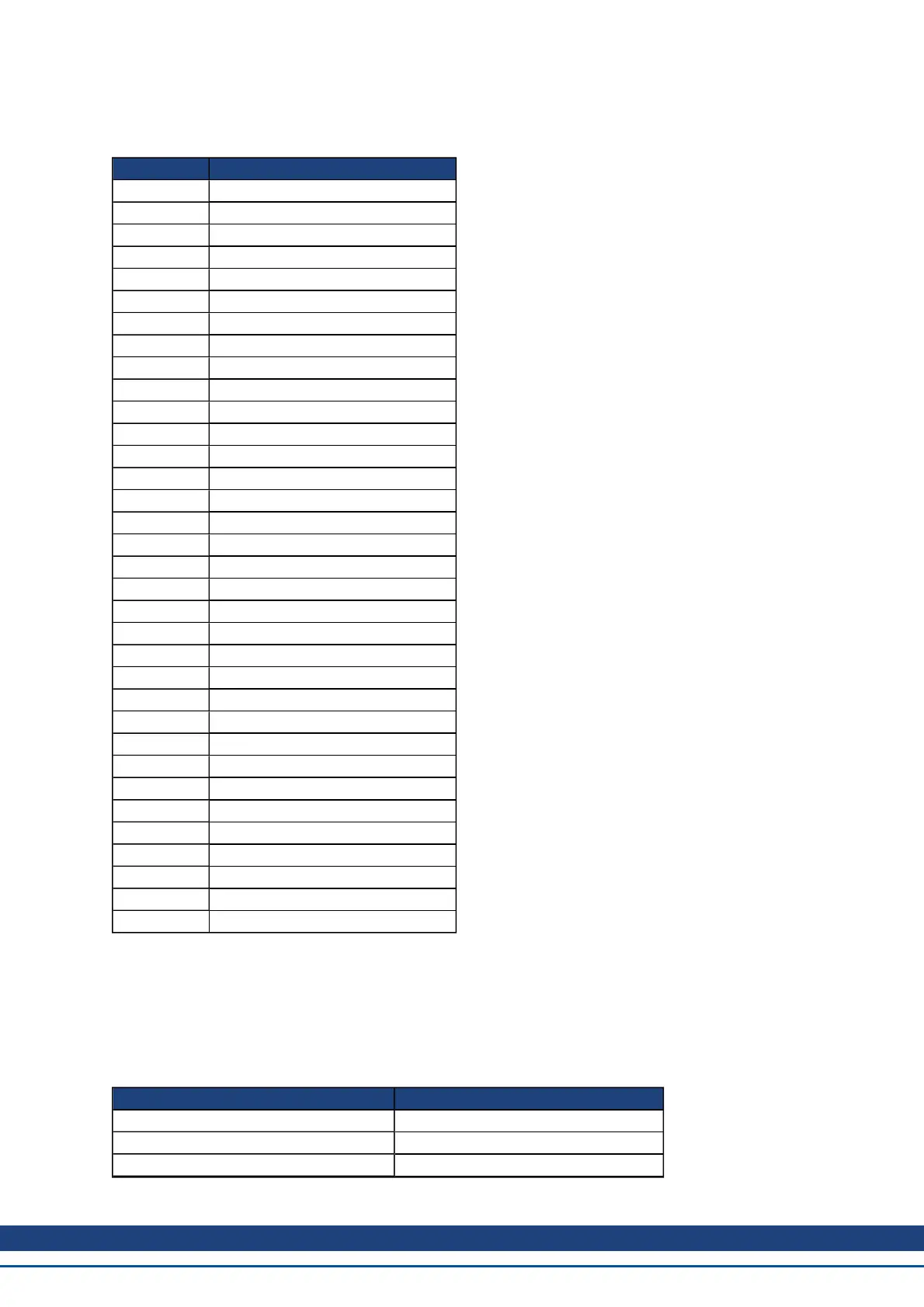
Parameter and Command Naming Conventions
Abbreviation Term
ACC Acceleration
APP Apply
CLR Clear
CS Controlled Stop
I Current
D Current d-component
DEC Deceleration
DIR Direction
DIS Disable
DIST Distance
EMUE Emulated encoder
EN Enable
ERR Error
F Fault
FB Feedback
FF Feedforward
K Gain
INT Integrator
LIM Limit
L Loop
MAX Maximum
MIN Minimum
N Negative
NV Nonvolatile
P Position, Proportional, Positive
RLS Release
R Resistance
STATE Status, State, Stat
THRESH Threshold
T Time
TMAX Timeout
U User
V Velocity, Volt
W Warning
Summary of Parameters and Commands
This table contains an alphabetical list of parameters and commands, with a brief description for each. The
parameter name and description are linked to the parameter tables. The description field also notes if a parameter
is not active in all opmodes. Generally speaking, all parameters and commands are active in all opmodes, with
the following exceptions:
Parameter or Command Active in Opmodes
GEAR (all parameters and commands) 2 (position) only
HOME (all parameters and commands) 2 (position) only
MT (all parameters and commands) 2 (position) only
AKD User Guide | About the Parameter and Command Reference Guide
Kollmorgen | December 2010 253

 Loading...
Loading...






