VL.KP
General Information
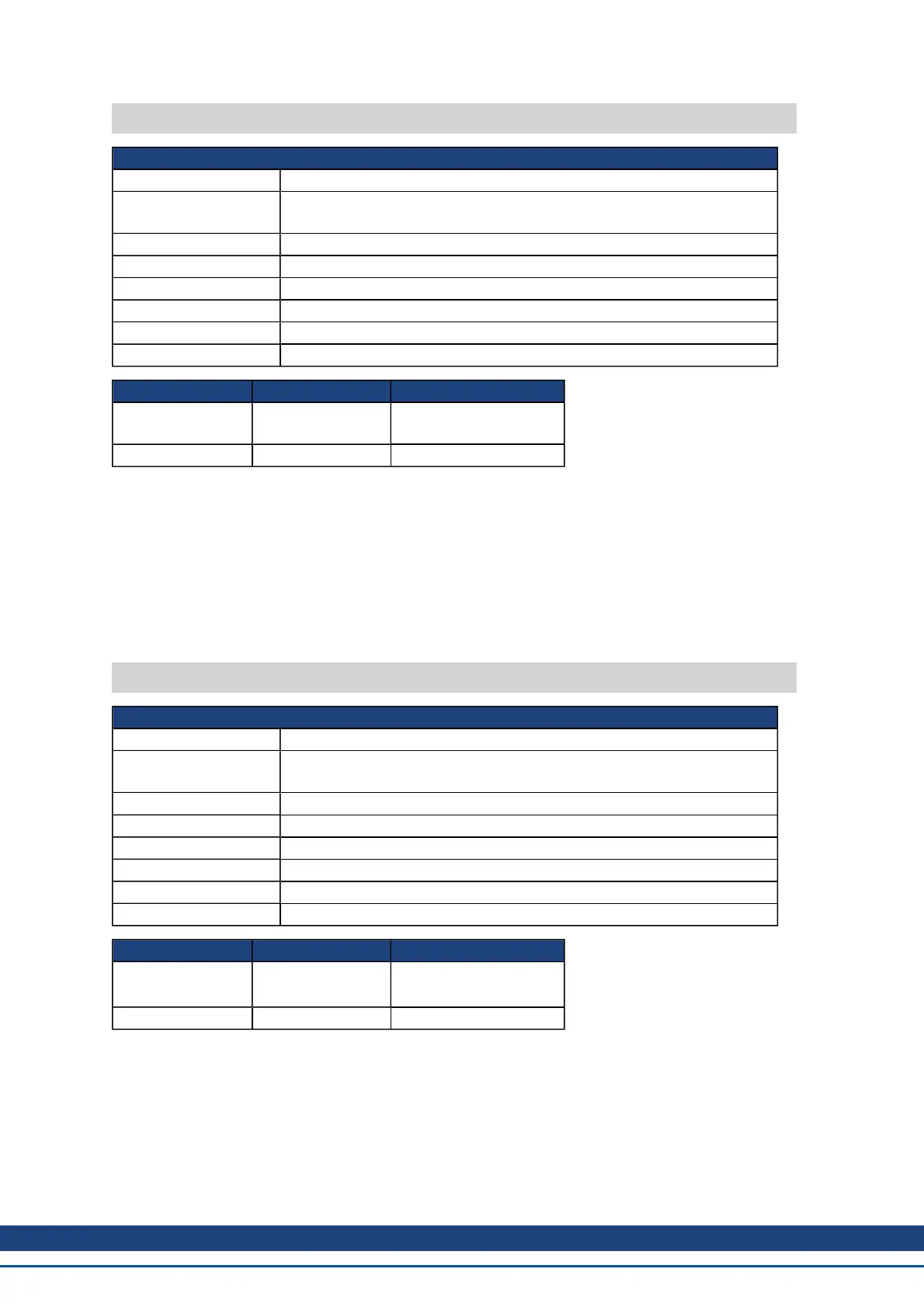
Type NV Parameter
Description
Sets velocity loop proportional gain for the PI controller; active in opmodes
1 (velocity) and 2 (position) only.
Units A/(rad/sec)
Range 0.001 to 2,147,483.008
Default Value 1
Data Type Float
See Also VL.KI
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
3548h/0 M_01-00-00-000
Modbus 872 M_01-03-00-000
Description
VL.KP sets the proportional gain of the velocity loop.
The idealized velocity loop bandwidth in Hz is:
VL.KP *Kt/ (2π *Jm)
Where:
Kt is the motor torque constant and Jm is the total shaft inertia. The units of Kt/Jm are rad/sec
2
/A.
See Velocity Controller Environment Block Diagram for more information.
VL.KVFF
General Information
Type R/W Parameter
Description
Sets the velocity loop velocity feedforward gain value; active in opmodes
1 (velocity) and 2 (position) only.
Units NA
Range 0.0 to 2.0
Default Value 0.0
Data Type Float
See Also VL.FF
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
3407h
354Bh/0
M_01-00-00-000
Modbus 874 M_01-03-00-000
Description
This parameter sets the gain for the velocity feedforward (a scaled derivative of the position command is added
to the velocity command value). The nominal feedforward value can be multiplied by this gain value.
This parameter is only used in the position mode (DRV.OPMODE = 2).
Related Topics
11.4 Velocity Loop
AKD User Guide | VL Parameters
Kollmorgen | December 2010 641

 Loading...
Loading...






