MT.V
General Information
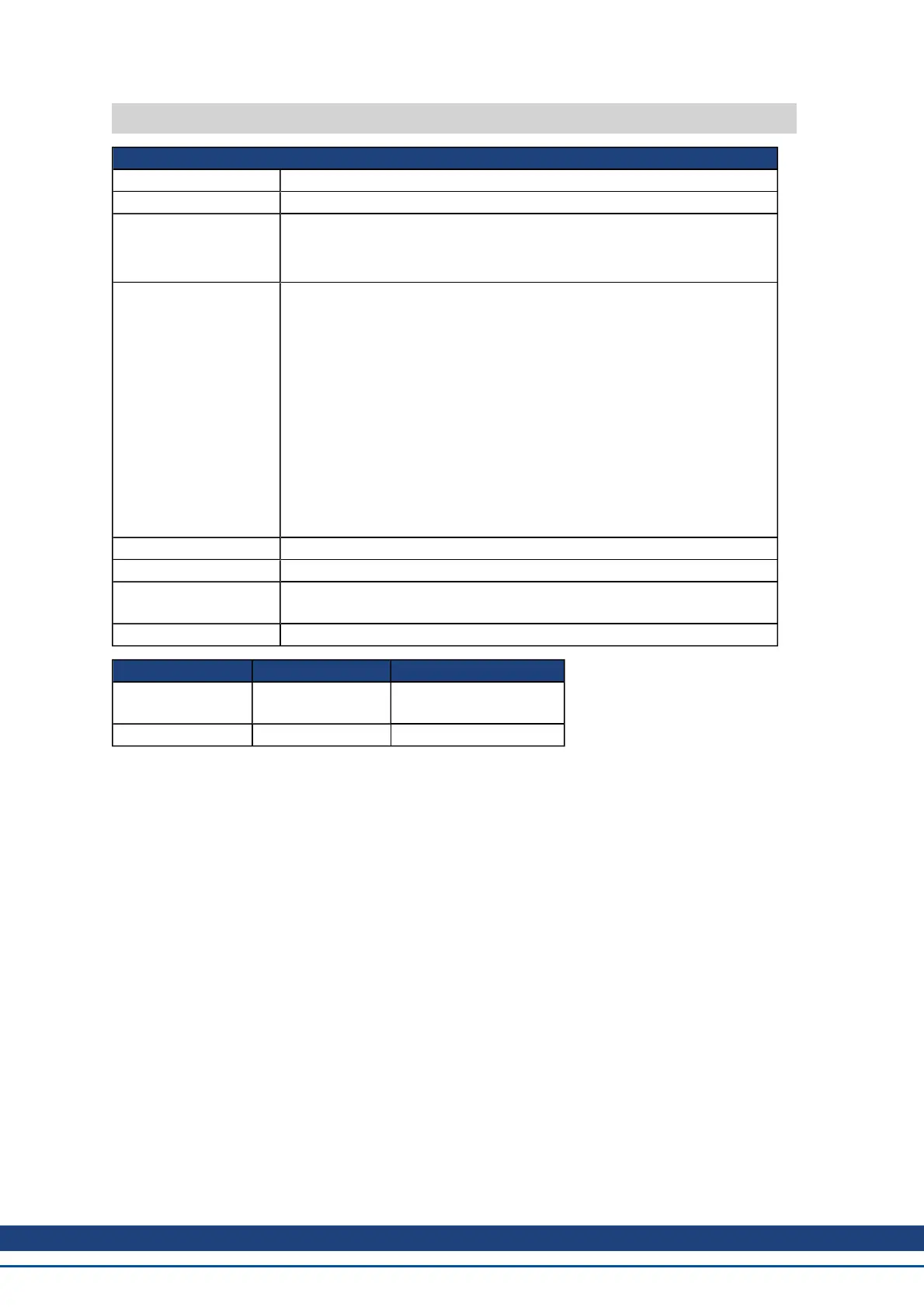
Type R/W Parameter
Description Sets the motion task velocity; active in opmode 2 (position) only.
Units
Depends on UNIT.VROTARY or UNIT.VLINEAR
Rotary: rpm, rps, deg/s, (PIN/POUT)/s, rad/s
Linear: counts/s, mm/s, µm/s, (PIN/POUT)/s
Range
Rotary:
0.000 to 12,000.000 rpm
0.000 to 200.000 rps
0.000 to 72,000.000 deg/s
0.000 to 1,000.000 (PIN/POUT)/s
0.000 to 1,256.637 rad/s
Linear:
0.000 to 0.200 counts/s
0.000 to 200.000*MOTOR.PITCH mm/s
0.000 to 200,000.000*MOTOR.PITCH µm/sec
0.000 to 1000.000 (PIN/POUT)/s
Default Value 0
Data Type Float
See Also
MT.NUM , MT.P, MT.CNTL, MT.ACC, MT.DEC, MT.TNUM,
MT.MTNEXT , MT.TNEXT, MT.SET , MT.LOAD
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
6081h6081h M_01-00-00-000
Modbus 566 M_01-03-00-000
Description
MT.V specifies the motion task velocity, which is used by the MT.SET and MT.LOAD command. This param-
eter is a temporary value. A motion task is only set after an MT.SET command. The motion task velocity is fur-
thermore limited by VL.LIMITP or VL.LIMITN depending on the direction of the motion task.
A value of 0 should not be used when setting a motion task via MT.SET because this value causes a validity
check of the MT.SET command to fail.
A value of 0 after an MT.LOAD command displays an empty (not initialized) motion task.
Related Topics
12.2 Motion Tasks
AKD User Guide | MT Parameters and Commands
Kollmorgen | December 2010 535
 Loading...
Loading...









