11.3 Current Loop
11.3.1 Overview
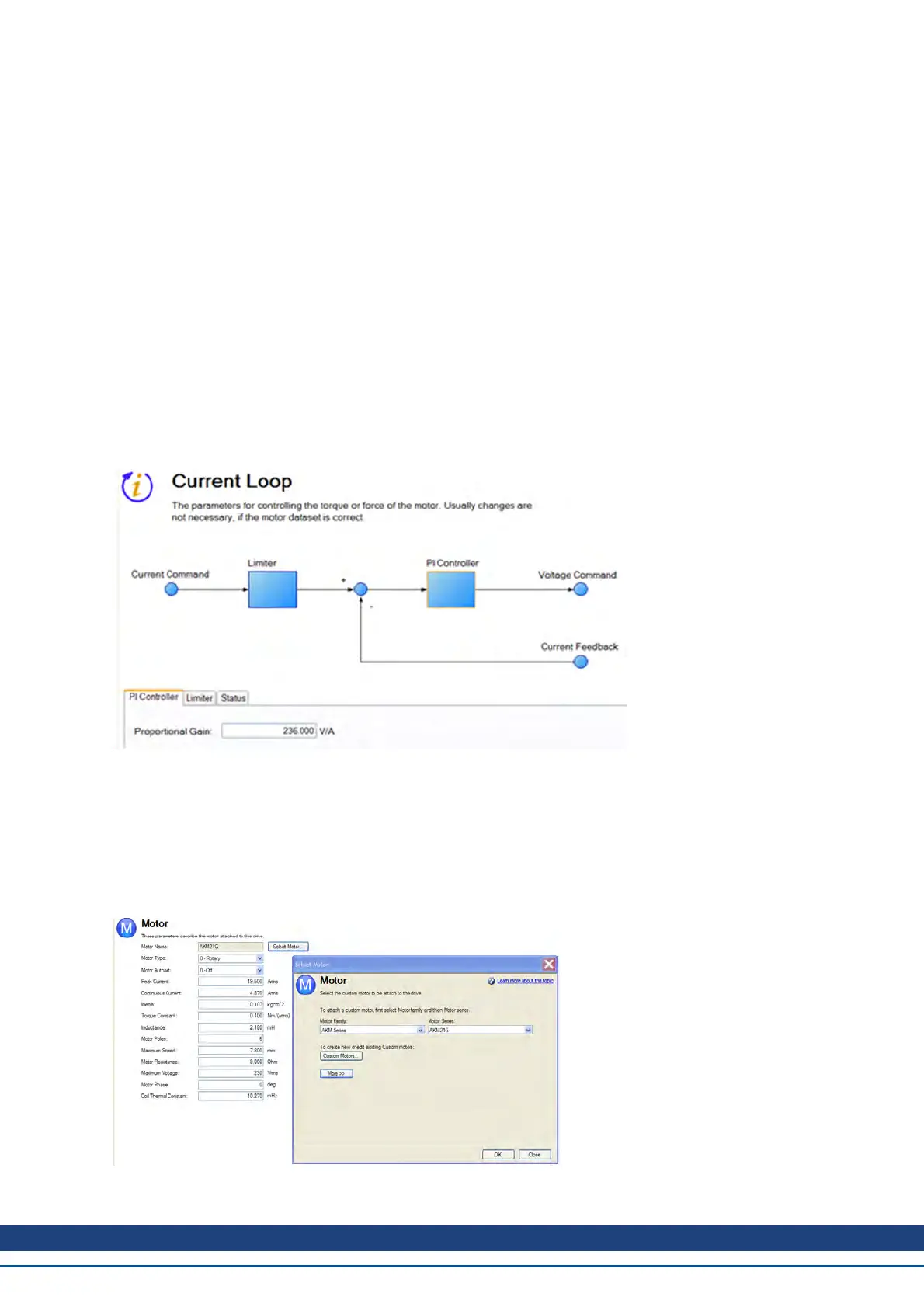
The current loop is active when the drive operates in current torque (current) mode (DRV.OPMODE = 0). The
parameters that govern the current loop are shown in the Current Loop view. The various types of tuning for the
drive adjust these parameters automatically, so you normally do not need to adjust the current loop parameters in
the current loop screen. The Current Loop view includes an active block diagram. If you click on a block in the dia-
gram, the appropriate tab opens below.
A more detailed block diagram for the current loop is included in Block Diagrams
11.3.2 Current Loop Gain
The current loop is tuned based on the inductance of the motor used with the drive. The current loop gain is auto-
matically set so that the idealized current loop crossover frequency is IL.KP/L in rad/sec where L is the motor
line-line inductance.
Current loop gain is set automatically by the drive using the following methods:
l Option A. When a feedback device is automatically identified by the drive and the motor data is auto-
matically populated (Motor Autoset = 1-On) the proportional gain of the current loop (il.kp) is set based on
the motor data and is shown as a read-only parameter in the current loop screen.
l Option B.When the motor is selected using the motor database or using the custom motor tool, the
imported inductance value is used to set the current loop proportional gain.
AKD User Guide | 11 Using Command Source and Operating Modes
Kollmorgen | December 2010 113

 Loading...
Loading...






