AKD User Guide | VL Parameters
VL.ARZF1 TO VL.ARZF4
General Information
Type R/W Parameter
Description
Sets the natural frequency of the zero (numerator) of anti-resonance
(AR)filter 1; active in opmodes 1 (velocity) and 2 (position) only.
Units Hz
Range 5 to 5,000 Hz
Default Value 500 Hz
Data Type Float
See Also
VL.ARPF1 TO VL.ARPF4,VL.ARPQ1 TO VL.ARPQ4, VL.ARZQ1 TO
VL.ARZQ4
Start Version M_01-02-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
3406h/9 VL.ARZF1
3406h/A VL.ARZF2
3406h/B VL.ARZF3
3406h/C VL.ARZF4
M_01-02-00-000
Modbus
832 VL.ARZF1
834 VL.ARZF2
836 VL.ARZF3
838 VL.ARZF4
M_01-03-00-000
Description
VL.ARZF1 sets the natural frequency of the zero (numerator) of AR filter 1. This value is F
Z
in the approximate
transfer function of the filter:
ARx(s) = [s²/(2πF
Z
)² +s/(Q
Z
2πF
Z
) + 1]/ [s²/(2πF
P
)² +s/(Q
P
2πF
P
) + 1]
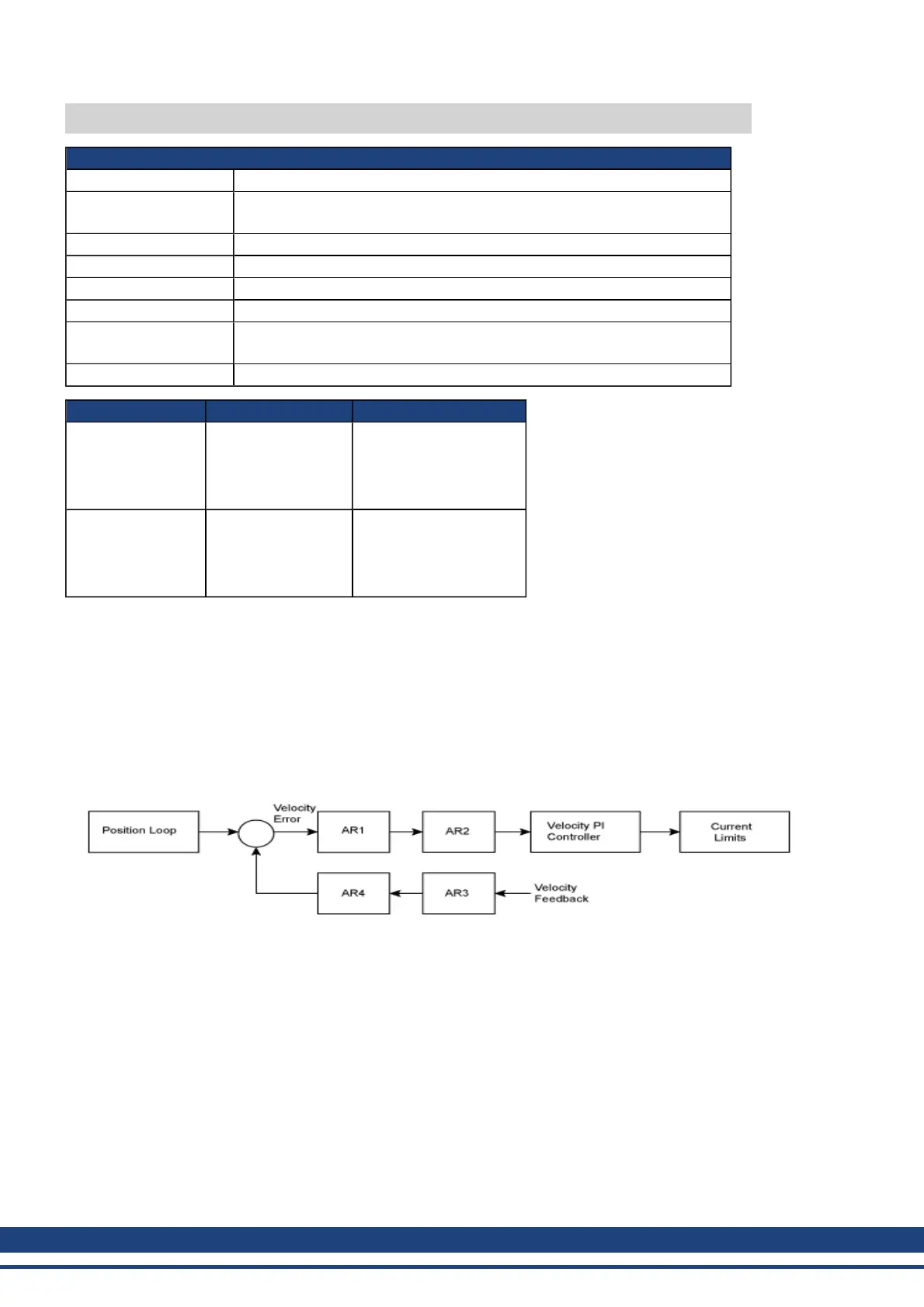
The following block diagram describes the AR filter function; note that AR1 and AR2 are in the forward path,
while AR3 and AR4 are applied to feedback:
AR1, AR2, AR3, and AR4 are used in velocity and position mode, but are disabled in torque mode.
Discrete time transfer function (applies to all AR filters)
The velocity loop compensation is actually implemented as a digital discrete time system function on the DSP.
The continuous time transfer function is converted to the discrete time domain by a backward Euler mapping:
s ≈ (1-z
-1
)/t, where t = 62.5 µs
The poles are prewarped to F
P
and the zeros are prewarped to F
Z
.
Related Topics
11.4 Velocity Loop
626 Kollmorgen | December 2010

 Loading...
Loading...






