AKD User Guide | PL Parameters
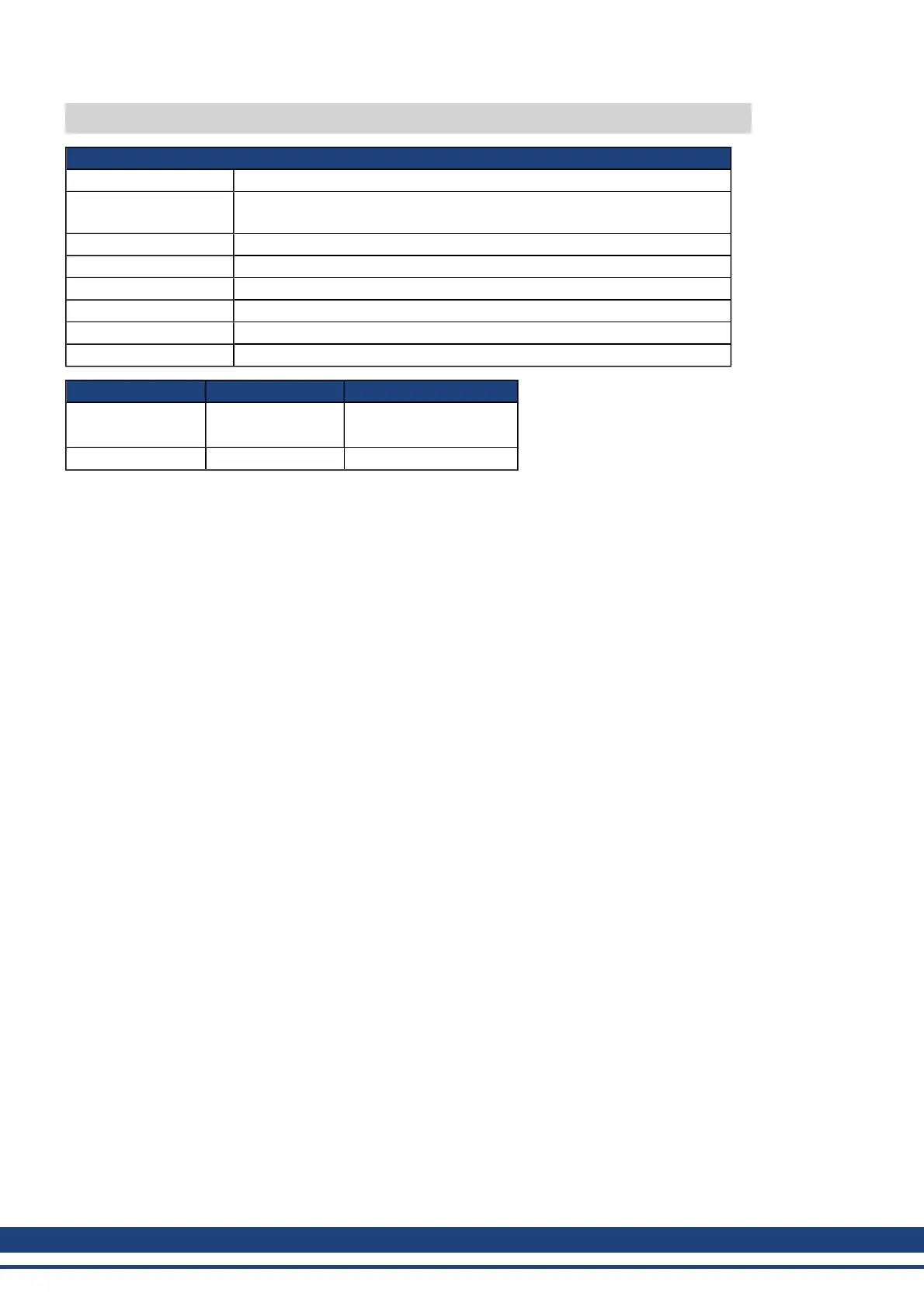
PL.ERR
General Information
Type NV Parameter
Description
Returns the position error present when the drive is controlling the position
loop.
Units counts,rad, deg, (PIN/POUT)
Range N/A
Default Value N/A
Data Type Float
See Also PL.FB
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
35C5h/0
60F4h/0
M_01-00-00-000
Modbus 574 (64-bit) M_01-03-00-000
Description
PL.ERR returns the position error present when the drive is controlling the position loop. PL.ERRis the dif-
ference between the actual position of the motor shaft(PL.FB) and the commanded position of the drive
(PL.CMD). If the drive is not in the position operating mode (DRV.OPMODE = 2), then the PL.ERR value is not
generated by the drive and this parameter is readas 0.
Related Topics
11.5 Position Loop
538 Kollmorgen | December 2010
 Loading...
Loading...









