AKD User Guide | GEAR Parameters
GEAR.MODE
General Information
Type R/W Parameter
Description Selects electronic gearing mode; active in opmode 2 (position) only.
Units N/A
Range 0 to 1
Default Value 0
Data Type Integer
See Also N/A
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
Modbus 376 M_01-03-00-000
Description
This parameter selects the electronic gearing mode at the beginning of the electronic gearing procedure. The gear-
ing mode determines drive synchronization. In the context of electronic gearing, synchronization means that the
slave follows the master pulses without losing counts due to acceleration or velocity limitations.
l Mode 0: The slave is not immediately synchronized after a GEAR.MOVE command. The slave accel-
erates until the master velocity (velocity after the gearing) has been reached. The drive is synchronized as
soon as the velocity of the master has been reached.
l Mode 1: The slave is immediately synchronized after a GEAR.MOVE command.
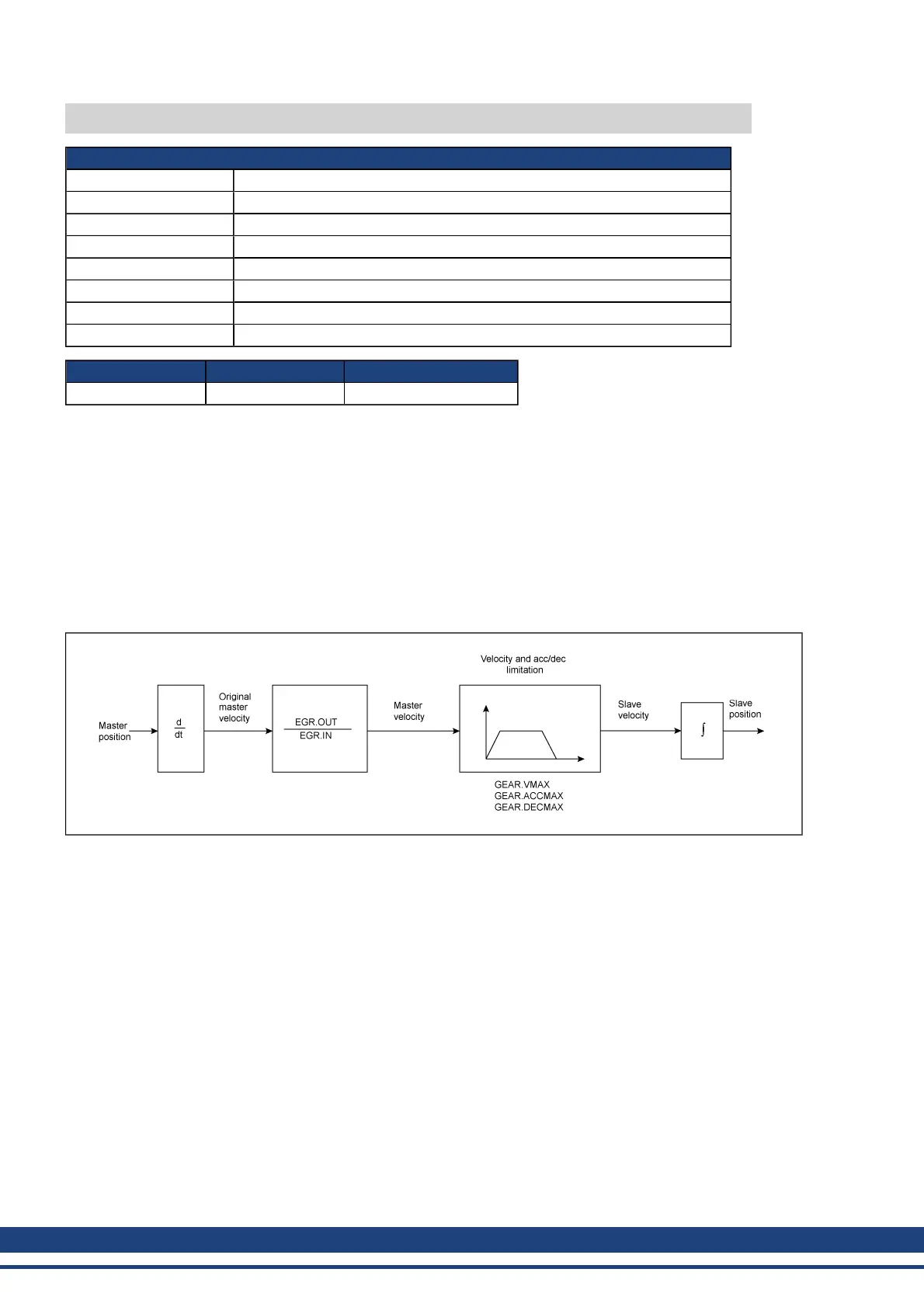
Block diagram of the electronic gearing feature
The slave position is forwarded to the position loop. Ensure that DRV.OPMODE has been set to 2 and
DRV.CMDSOURCE has been set to 2. The slave is able to reach the master velocity according to the
GEAR.VMAX setting. GEAR.VMAX does not limit the slave velocity.
432 Kollmorgen | December 2010

 Loading...
Loading...






