AKD User Guide | 12 Creating Motion
d. The motor moves to the home Position (HOME.P) value plus the distance move offset is applied (if
present), which is located at the mechanical zero-angle of the motor feedback.
Homing Mode 5 Example
Move in the positive direction towards the home reference point and then move 60 degrees from the zero angle
location.
1. Select Mode 5 from the drop down box.
2. Set the Direction to Positive and enter 60 for distance.
3. When Start is selected, the motor will move until it encounters the Home reference switch. As soon as the
switch is triggered, the motor will move to the zero angle location plus an additional 60 degrees as desired.
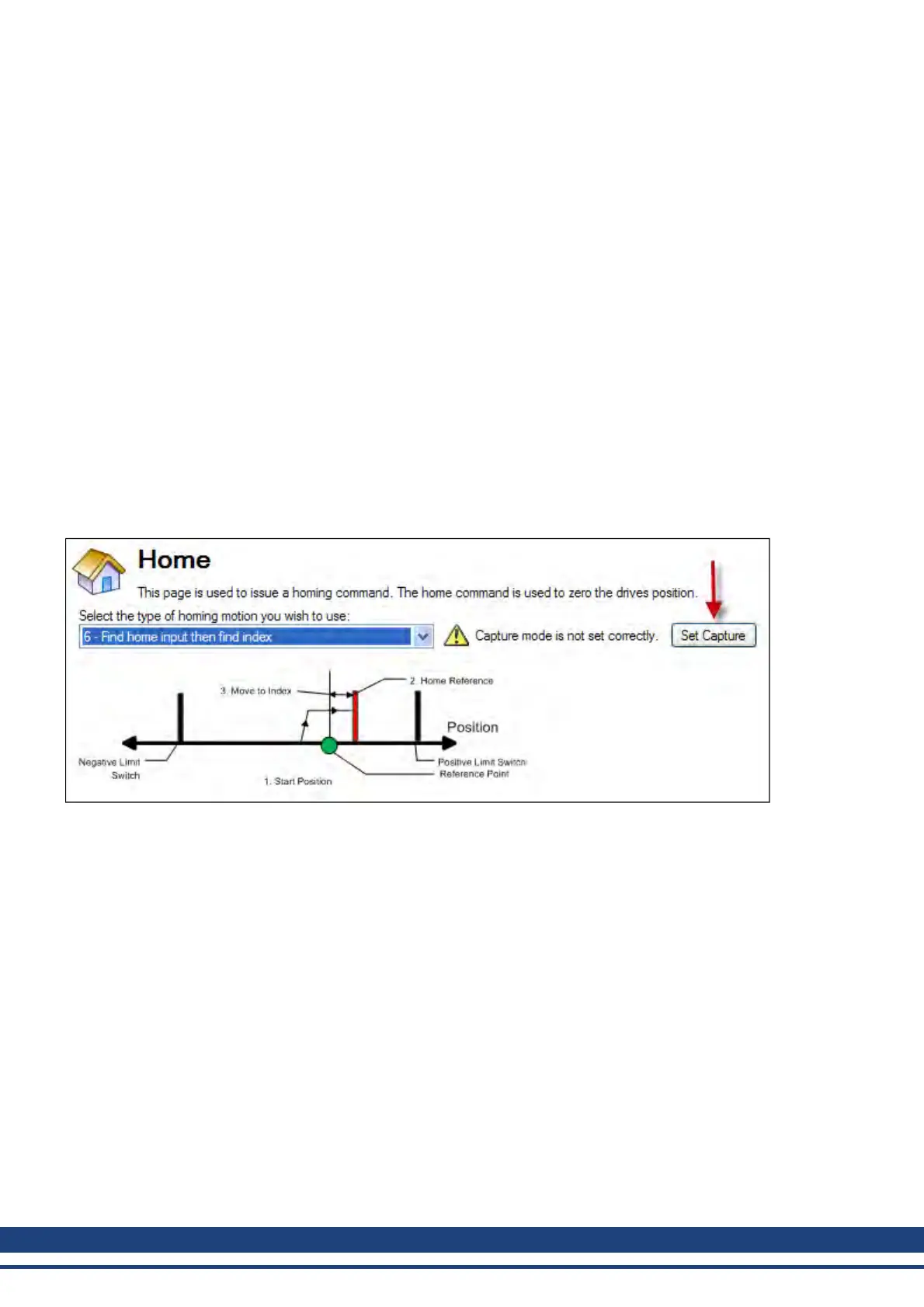
Homing Mode 6: Find Home Input then Find Index
Similar to the Home input method, this follows the same logic as the other homing methods, first completing the
home to input method, and finding the index pulse of the motor feedback.
This homing mode starts motion until a digital input, which is assigned to act as a home-switch, has been acti-
vated. The motor moves afterwards with a reduced velocity (HOME.FEEDRATE) until the index signal has been
detected by the drive. NOTE: This method requires that Capture Mode is turned on. This is done in the
home screen. With Mode 6 selected, a “Set Capture” button will appear (see arrow below). Pressing
the button sets the Position Capture mechanism correctly for proper homing with an index pulse..
The home-switch must be activated according to the setting of the HOME.DIR setting.
The sequence of this homing mode is as follows:
1. The motor starts to move according to the HOME.DIR command.
2. The motor decelerates to a reduced velocity according to the HOME.FEEDRATE setting as soon as the
home-switch becomes active during a motion in direction of the HOME.DIR setting.
3. The actual- and the command position of the drive will immediately be set to the HOME.P value as soon
as the index-signal has been detected. The motor decelerates until velocity 0 has been reached.
The hardware limit switches are monitored during the whole homing procedure. The drive behaves as follows in
case that a hardware limit switch is active before the home-switch has been activated:
a. The motor changes the direction until the home-switch is crossed.
b. The motor ramps down to zero velocity and changes direction again after crossing the home-switch.
c. The home-switch will now be activated according to the HOME.DIR command. The motor decel-
erates to a reduced velocity according to the HOME.FEEDRATE setting as soon as the home-
switch becomes active.
d. The actual and the command position of the Drive will immediately be set to the HOME.P value as
soon as the index-signal has been detected. The motor decelerates until zero velocity has been
reached. The axis is then moved to the position (HOME.P) + distance offset (HOME.DIST).
126 Kollmorgen | December 2010

 Loading...
Loading...






