AKD User Guide | 18 Troubleshooting the AKD
18 Troubleshooting the AKD
Faults occur for a variety of reasons, depending on the conditions in your installation. The causes of faults in
multi-axis systems can be especially complex. If you cannot resolve a fault using the troubleshooting guidance
presented below, customer support can give you further assistance.
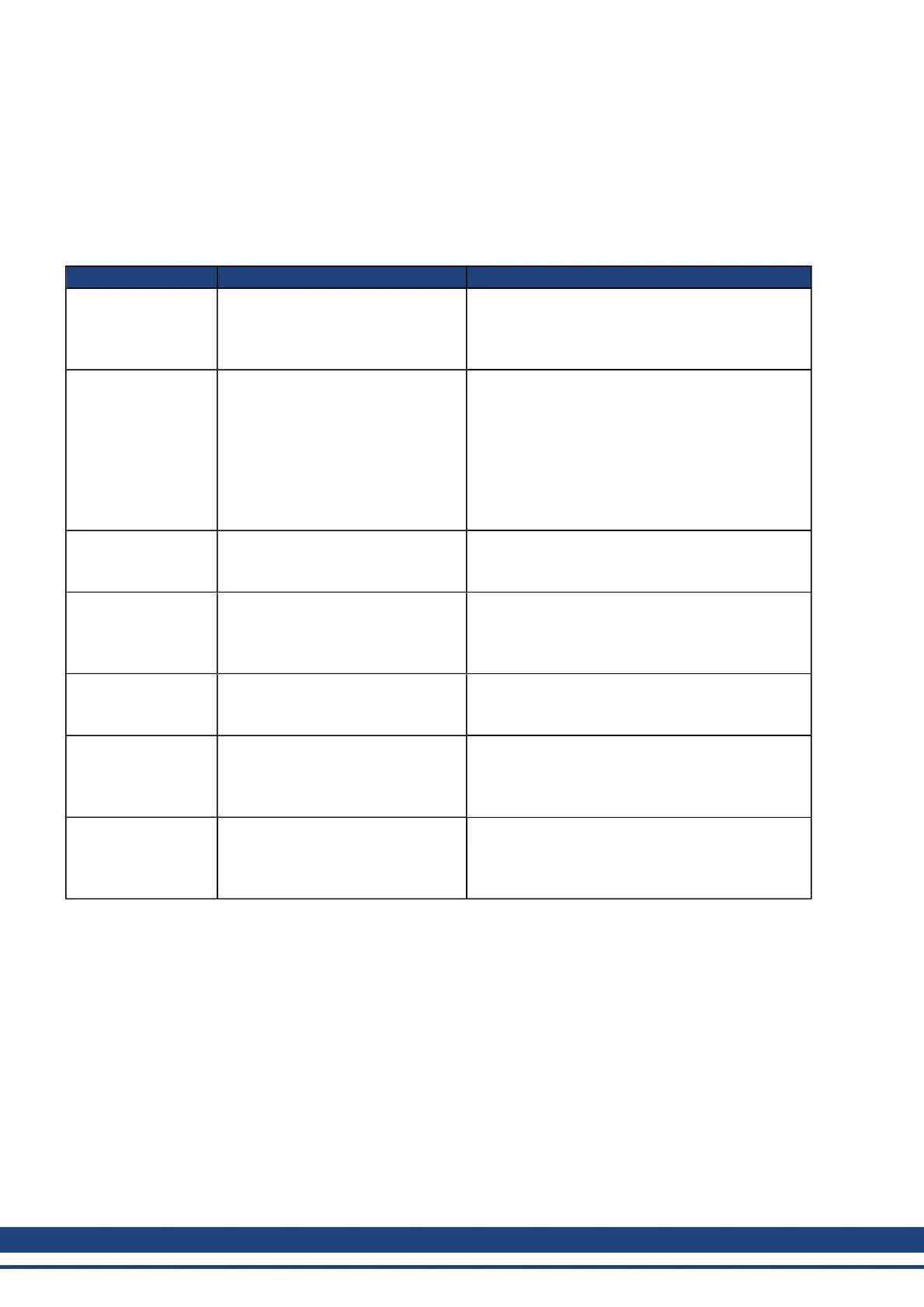
Fault Possible Causes Remedy
HMI message:
Communication fault
— wrong cable used
— cable plugged into wrong position
on servo amplifier or PC
— wrong PC interface selected
— plug cable into the correct sockets on the servo
amplifier and PC
— select correct interface
Motor does not rotate — servo amplifier not enabled
— software enable not set
— break in setpoint cable
— motor phases swapped
— brake not released
— drive is mechanically blocked
— motor pole no. set incorrectly
— feedback set up incorrectly
— apply ENABLE signal
— set software enable
— check setpoint cable
— correct motor phase sequence
— check brake control
— check mechanism
— set motor pole no.
— set up feedback correctly
Motor oscillates — gain is too high (speed controller)
— feedback cable shielding broken
— AGND not wired up
— reduce VL.KP (speed controller)
— replace feedback cable
— join AGND to CNC-GND
Drive reports
following error
— Irms or Ipeak set too low
—current or velocity limits apply
— accel/decel ramp is too long
—verify motor/drive sizing
—verify that IL.LIMITN, IL.LIMITP, VL.LIMITN, or
VL.LIMITP is not limiting the drive
—reduce DRV.ACC/DRV.DEC
Motor overheating — motor operating above its rating —verify motor/drive sizing
—verify motor continuous and peak current values
are set correctly
Drive too soft —Kp (speed controller) too low
—Ki (speed controller) too low
—filters set too high
—increase VL.KP (speed controller)
—increase VL.KI (speed controller)
—refer to documentation regarding reducing fil-
tering (VL.AR*)
Drive runs roughly —Kp (speed controller) too high
—Ki (speed controller) too high
— filters set too low
—reduce VL.KP (speed controller)
—reduce VL.KI (speed controller)
—refer to documentation regarding increasing fil-
tering (VL.AR*)
224 Kollmorgen | December 2010

 Loading...
Loading...






