AKD User Guide | 10 Configuring General Drive Settings
Minimum Supply Voltage: 4.5 V calculated based on tolerance above
Maximum required encoder supply current: 50 mA
Example cable:
Lapp Li2YCY - 24AWG (0.22 mm^2)
Loop resistance: 0.186 Ohms/m
Sample Calculations:
Maximum Permissible voltage cable drop = 0.25 V
= (Minimum Supply Voltage from AKD) 4.75 V – (Minimum supply voltage of RI-36H encoder) 4.5V
Maximum permissible resistance of cable run to X9 = 5 Ohms
= (Max voltage cable drop) 0.25V ÷ (Maximum encoder current) 0.05A
Maximum permissible cable length for example application = 26.9 m
= (Max cable resistance) 5 Ohms ÷ 0.186 Ohms/m
10.7.4 Related Parameters:
GEAR Parameters
DRV.CMDSOURCE
DRV.EMUEMODEDRV.EMUEMODE
DRV.EMUERES
DRV.HANDWHEELDRV.HANDWHEEL
DRV.OPMODE
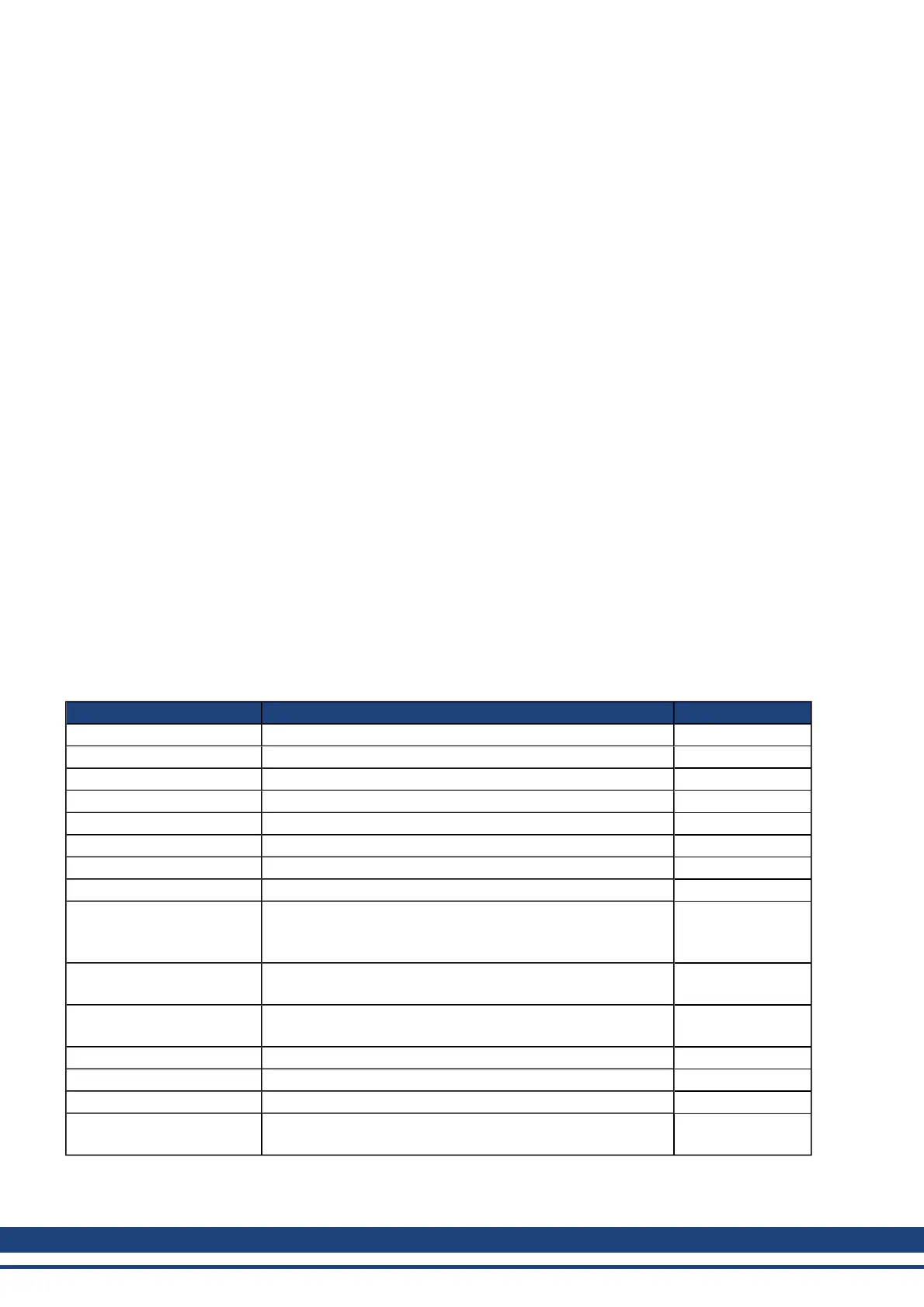
This screen allows you view and modify the various drive limits.
Button or Dialog Box Description Parameter
Current Limits
Positive Peak Current The maximum positive current allowed. IL.DLIMITP
Negative Peak Current The maximum negative current allowed. IL.DLIMITN
Velocity Limits
Positive Speed Limit The maximum speed allowed in the positive direction. VL.LIMITP
Negative Speed Limit The maximum speed allowed in the negative direction. VL.LIMITN
Over Speed Limit The threshold velocity for an over speed fault. VL.THRESH
Position Limits
Maximum Following Error
The maximum position error. If the position error PL.ERR is
larger than PL.ERRFTHRESH, then the drive generates a
fault
PL.ERRFTHRESH
Position Limit 0
The minimum position the drive can reach before generating a
negative software position fault.
SWLS.LIMIT0
Position Limit 1
The maximum position the drive can reach before generating
a positive software position fault.
SWLS.LIMIT1
Acceleration Limits
Acceleration The acceleration ramp used to profile some motion. DRV.ACC
Deceleration The deceleration ramp used to profile some motion. DRV.DEC
Motor Limits
Motor limits are set through the Motor Foldback Screen (see
8.8 Foldback
100 Kollmorgen | December 2010
 Loading...
Loading...









