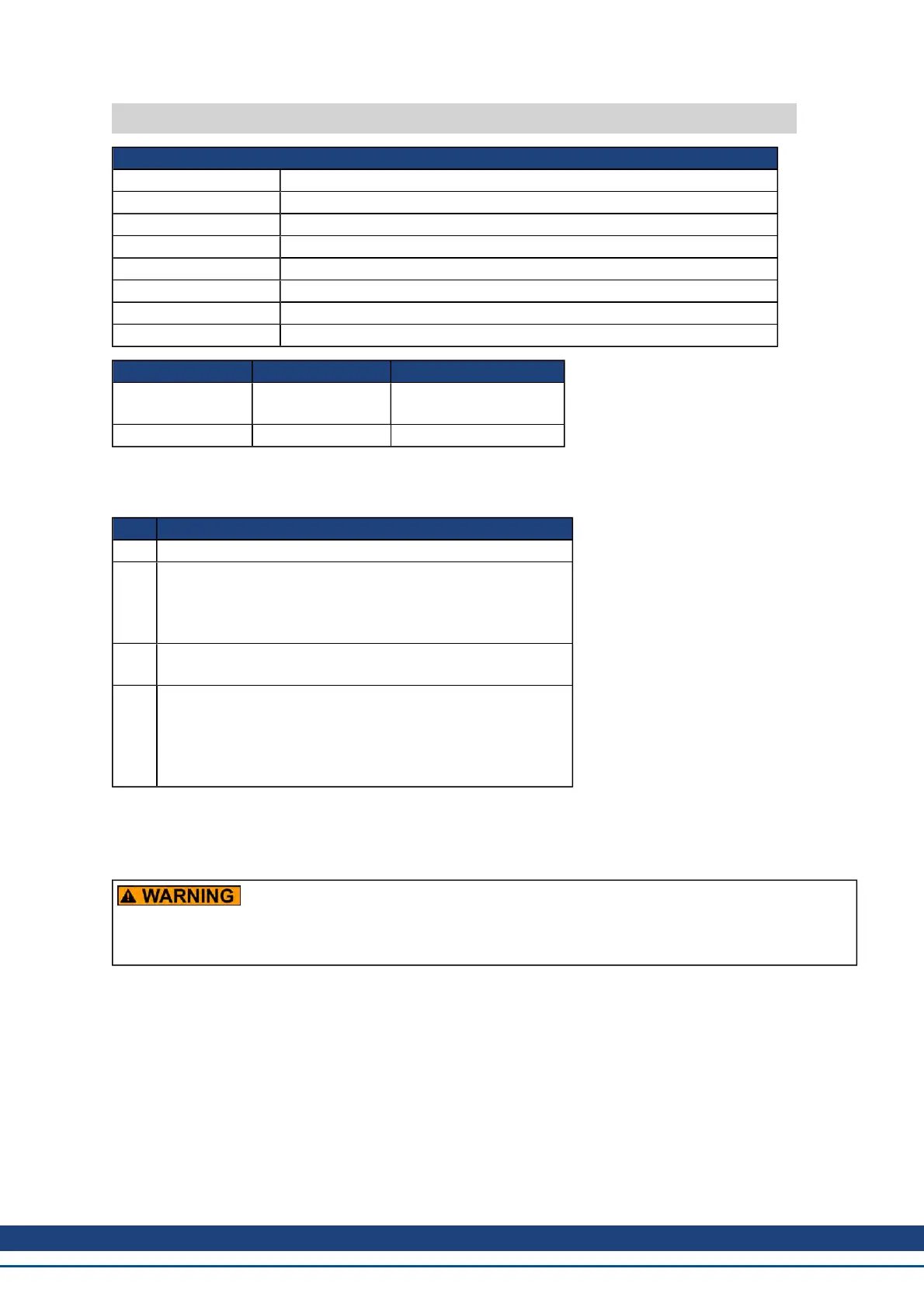
DRV.DISMODE
General Information
Type NV Parameter
Description Selects among disable immediately or stop and then disable options.
Units N/A
Range 0 to 3
Default Value 0
Data Type Integer
See Also DRV.DBILIMIT ,DRV.DISTO, CS.VTHRESH
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
35FFh/0 M_01-00-00-000
Modbus 238 M_01-03-00-000
Description
DRV.DISMODE sets the drive reaction to a DRV.DIS command.
Value Behavior
0 Disable axis immediately.
1
Use dynamic brake to ramp down. The drive remains in the
dynamic brake state after the motor has stopped. The drive is
disabled in the sense that it does not close the control loop
and cannot perform a motion, but PWM stays active.
2
Use a controlled stop to ramp down and then disable the
drive.
3
Use active disable to ramp down, and then use dynamic
brake. The drive remains in the dynamic brake state after the
motor has stopped. The drive is disabled in the sense that it
does not close the control loop and cannot perform a motion,
but PWM stays active.
In all cases described above, if a brake is configured (MOTOR.BRAKE), the brake closes if VL.FB drops below
CS.VTHRESH.
Be careful with vertical loads when modifying this parameter. Coordinate this parameter's
correct setting properly with the drive brake settings. If these settings are not coordinated,
then vertical loads may have no stopping or holding force when the drive is disabled and the
load could fall.
Related Topics
10.10 Controlled Stop
CS Parameters
10.11 Dynamic Braking
AKD User Guide | DRV Parameters and Commands
Kollmorgen | December 2010 355
 Loading...
Loading...









