AKD User Guide | 12 Creating Motion
Move in the positive direction towards a hard stop and limit the current to 1 amp. Allow 30 degrees of error before
considered at the hard stop. Then move to the zero angle of the motor and designate this as the 180 point.
1. Select Mode 9 from the drop down box.
2. Set the Direction to Positive, Position to 180, Position Lag to 30 degrees and Peak Current to 1.
3. When Start is selected, the motor will move to the hard stop with a peak current of 1 amp. As the position
error exceeds the 30 degrees, the home Position (HOME.P) is set and the Position will be set to 180.
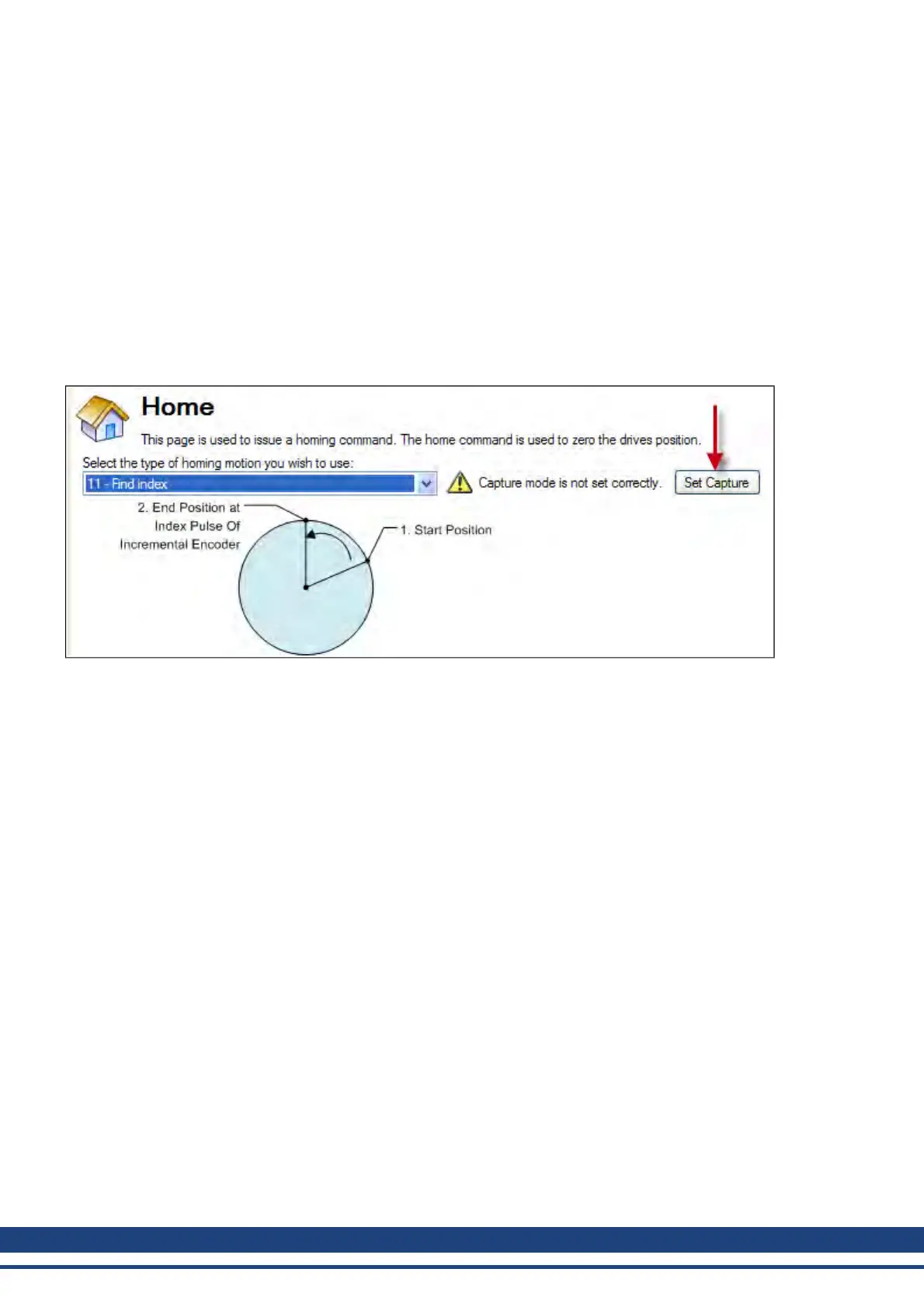
Homing Mode 11: Find Index
This method canonly beused withfeedback devices that havean index pulse suchas incrementalencoders and
analogsine encoders with anIndex channel (Feedback selection 10, 11, 20, 21). This methodrequires that Cap-
tureMode is turned onin thehome screen. WithMode 11selected, aSet Capture button appears (see arrow
below). Click Set Captureto set the positioncapture mechanism correctly forproper homingwith anindex pulse.
Once homing is triggered, the homing routine is performed as follows:
1. The motor starts to move according to the HOME.DIR setting.
2. The Motor is searching for the index pulse during this time.
3. If the Motor finds the Index pulse, then the Home-position is found.
4. The actual and the command position of the Drive will be set to the HOME.P value as soon as the index-
signal is found. The Drive then ramps down to velocity 0.
5. If the Limit switch is active before Index signal, then the Motor changes the direction and then repeats
steps 3 and 4.
Homing Mode 11 Example: Find Index Signal.
1. Select Mode 11 from the drop down box.
2. Set the Direction to Positive.
3. In the home screen press the “set capture” button.
4. When Start is selected, the motor will move until it encounters the index reference and then it stops.
5. If Limit switch is encountered before Index reference, the Motor changes direction and searches for Index
signal in the opposite direction.
Unlike Homing Mode 3, the Home position is set as soon as the index pulse is found, irrespective of the direction
of motion.
12.1.3 Using Homing: Advanced
The various homing methods in the AKD offer several options for setting up your home reference. When using
any of the methods that use homing switches and limits, please refer to the Input/Output section for proper wiring
techniques.
128 Kollmorgen | December 2010

 Loading...
Loading...






