Mode Selection:
Use this box to select the appropriate homing mode. Homing modes are described below in Selecting and Using
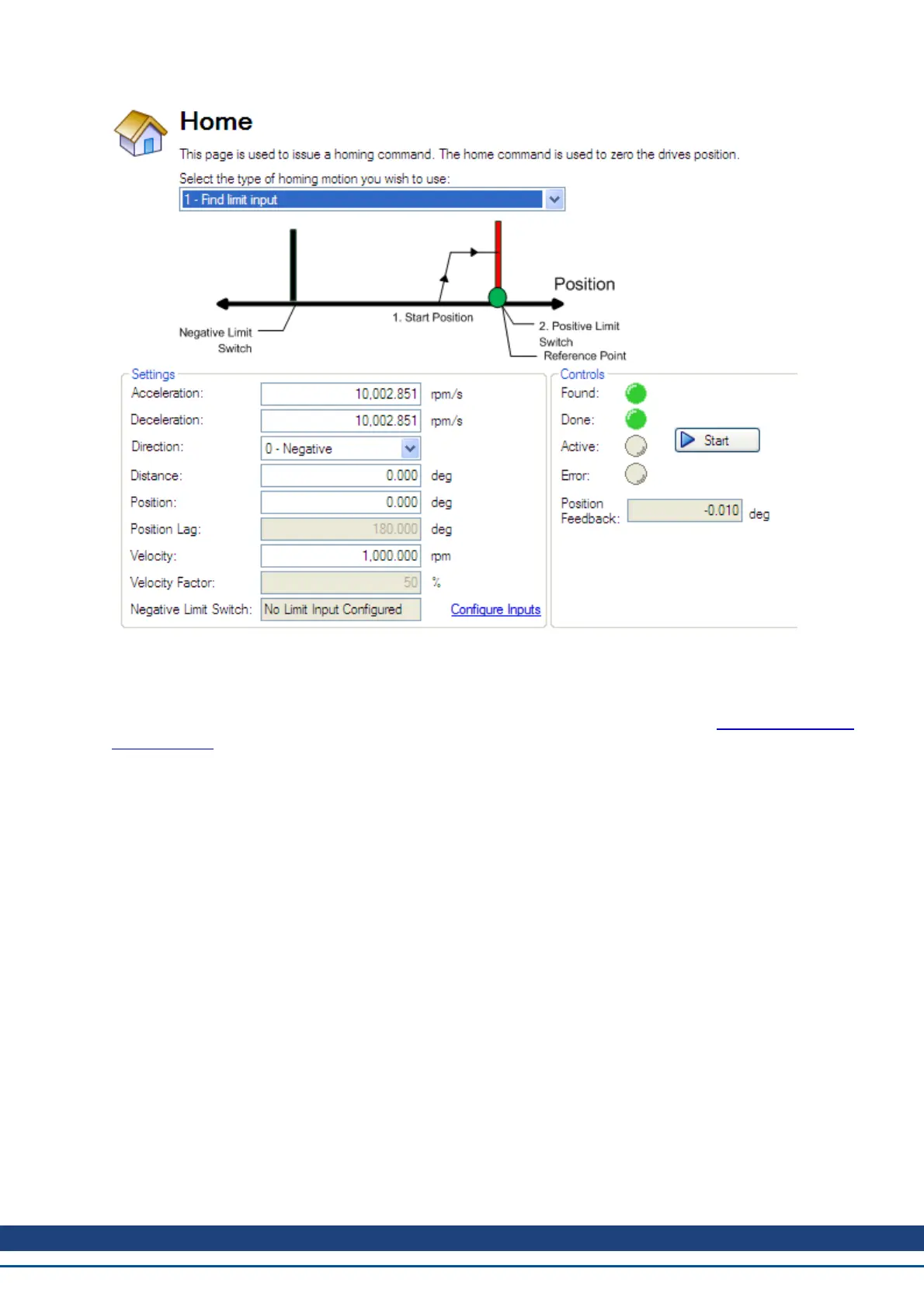
Homing Modes. The active options in the Settings area change depending on the homing mode selected.
Settings:
l Acceleration: Sets the acceleration ramp used during the homing procedure.
l Deceleration: Sets the deceleration ramp used during the homing procedure.
l Direction: Sets the start direction for homing movement.
l Distance: Sets a prescribed distance you want the motor to move once the home reference point is
found. A zero value (default) corresponds to the axis actively returning to the defined position found during
the homing process.
l Position: Sets the current position to a precribed value once the home reference point is found.
l Position Lag: Sets the position error threshold, which is used for indicating home reference when using
using the hardstop modes 8 and 9.
l Velocity: Sets the initial velocity used for homing moves.
l Velocity Factor: In modes where a limit is reached, and direction is reversed, the valocity factor allows
you to reduce the velocity as a precentage of the homing velocity.
l Positive/Negative Limit Switch/Home Reference/Peak Current: These fields appear based on the
mode selected. For homing to limits and home reference, this field will indicate how the digital inputs are
configured as well as providing a link to the digital input page. For Homing to a hard stop, the Peak Current
field allows you to set the peak current limit desired during homing.
AKD User Guide | 12 Creating Motion
Kollmorgen | December 2010 121
 Loading...
Loading...









