VL.KI
General Information
Type NV Parameter
Description
Sets the velocity loop integral gain for the PI controller; active in opmodes
1 (velocity) and 2 (position) only.
Units Hz
Range 0 to 1,000 Hz
Default Value 160 Hz
Data Type Float
See Also VL.KP
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
354Dh/0 M_01-00-00-000
Modbus 868 M_01-03-00-000
Description
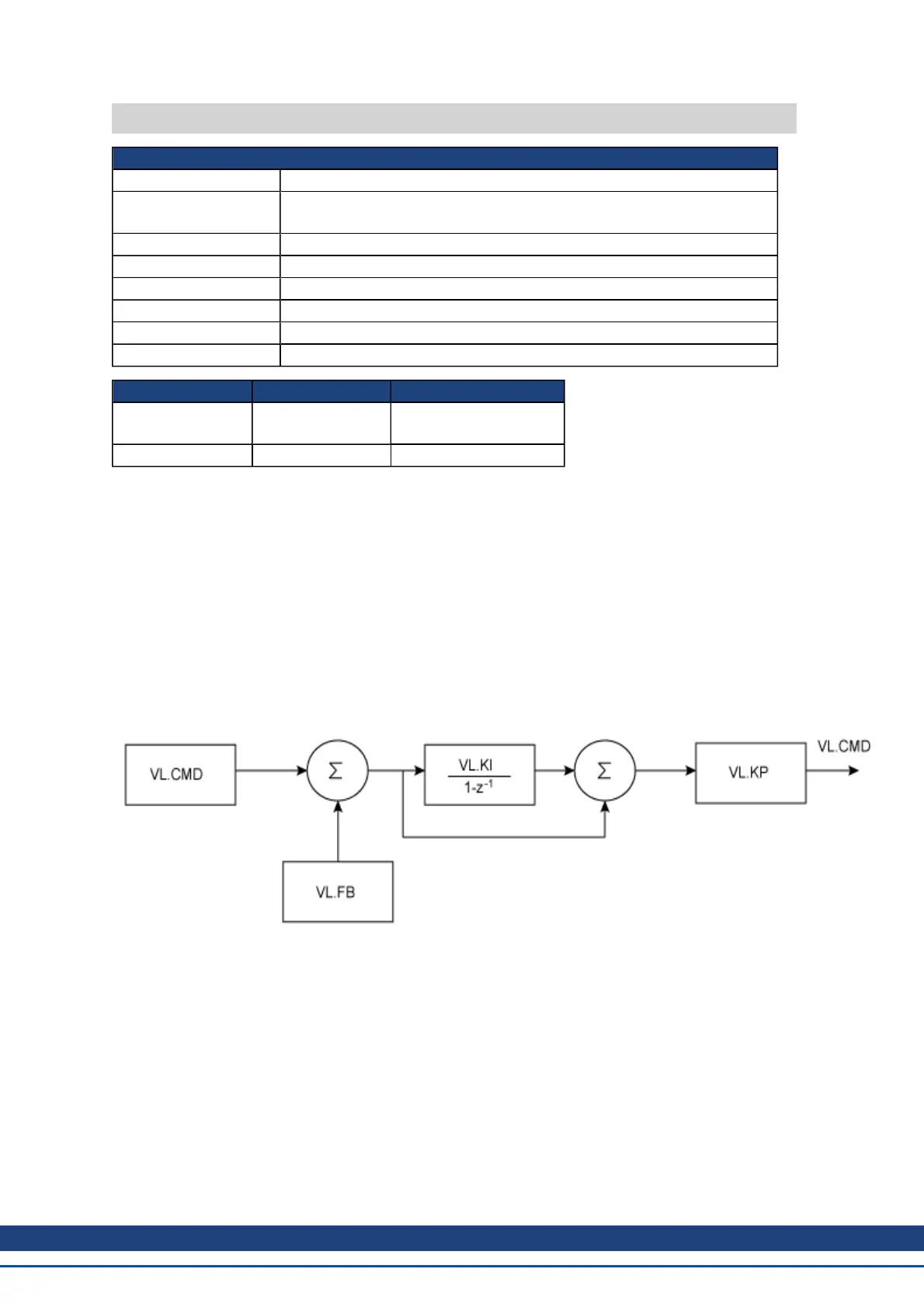
VL.KI sets the integral gain of the velocity loop.
A factor of 2π is included in the time calculation, therefore a PI velocity loop with a constant error of 1 rps in
which VL.KI is set to 160 and VL.KP is set to 1, will take (1000/160)*2π ms to increase the integral gain to 1.
Therefore, the total gain is 2 at this time (see velocity loop structure below).
Velocity Loop Structure
Related Topics
11.4 Velocity Loop
AKD User Guide | VL Parameters
Kollmorgen | December 2010 639

 Loading...
Loading...






