l WS.IMAX specifies the amplitude of the current pulse used during the initial/rough commutation. A
WS.IMAX value that is too low may result in a fault by failing to cause enough movement for com-
mutation. If the value is too high, the preset movement threshold could be exceeded, also resulting in a
fault. If the default value is producing faults for too little movement, gradually adjust this parameter to over-
come excessive friction and/or load on the system. WS.IMAX also specifies the maximum current used
in the second stage of commutation. The initial current is 25% of WS.IMAX, then steps up to 100% of
WS.IMAX.
l FB1.SELECT selects the type of feedback used by the amplifier. The WS feature is used only for FB1.-
SELECT = 11, 21, 31. The feedback must be configured prior to initiating the WS procedure.
l MOTOR.BRAKE If your amplifier has a motor brake, set MOTOR.BRAKE = 1. For motors without a
brake, set MOTOR.BRAKE = 0.
CAUTION
Adjust WS.T with extreme caution. Increasing WS.T increases the movement of the system. Applying an incor-
rect value of WS.T may cause erratic drive behavior.
NOTE
When initiating WS, the motor may experience a runaway. Stay clear of all moving parts. Ensure there are prop-
erly operating safety devices such as hardware limit switches and suitable end-of-travel limits.
NOTE
If WS.NUMLOOPS is less than 5, commutation may be incorrect. This condition may cause faults and/or
adversely affect performance or stability. Set WS.NUMLOOPS = 20.
8.3.9.4 Related Parameters
WS Parameters
DRV.IPEAK
FB1.SELECT
MOTOR.BRAKE
MOTOR.PHASE
MOTOR.IPEAK
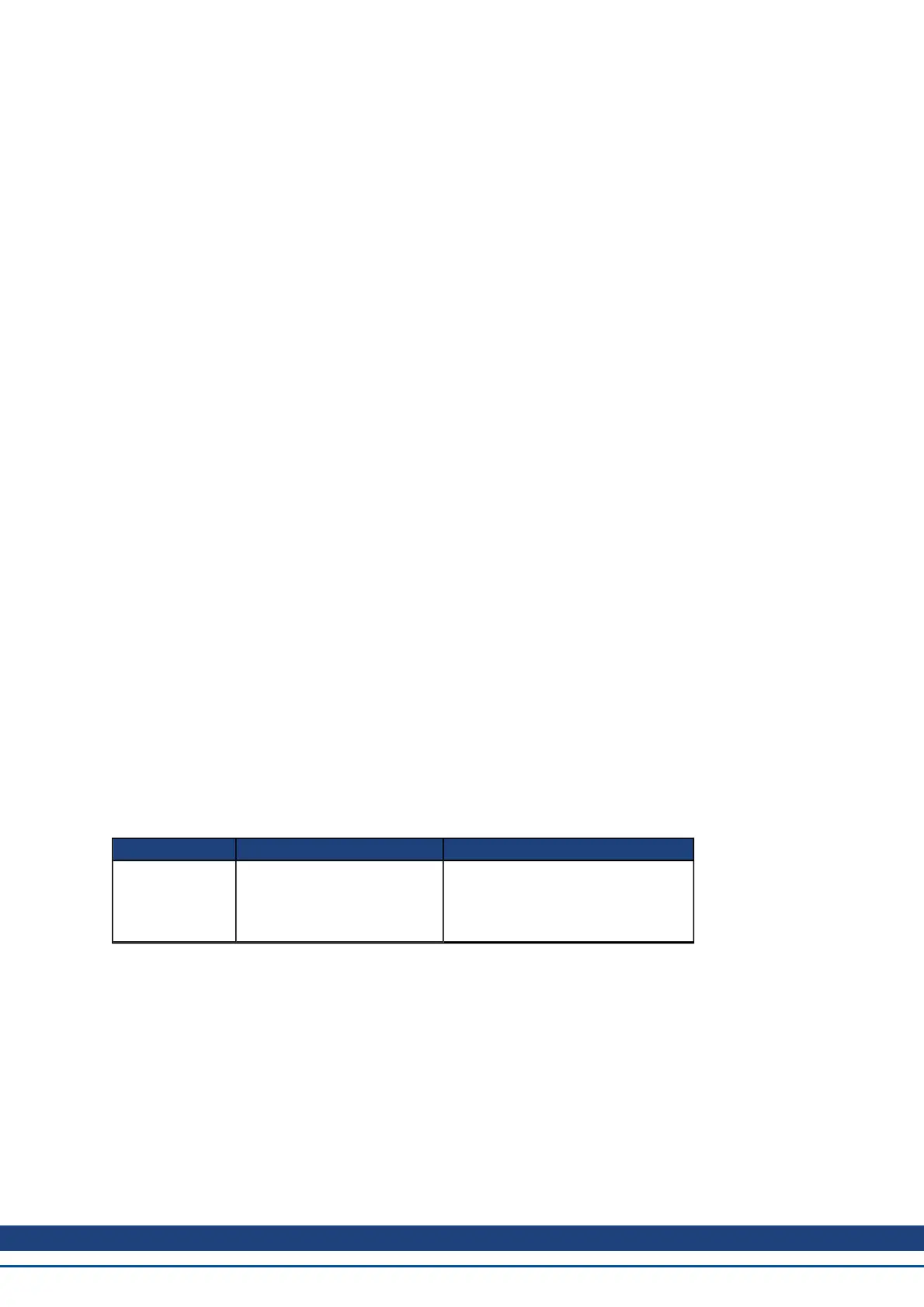
8.3.9.5 Troubleshooting WS
Problem Possible Cause Remedy
Excessive Move-
ment
l Brake slips on vertical
system.
l External forces on
motor too great.
l Check brake.
l Remove forces acting on
motor.
l Lower WS.IMAX.
AKD User Guide | 8 Configuring Motor Settings
Kollmorgen | December 2010 67

 Loading...
Loading...






