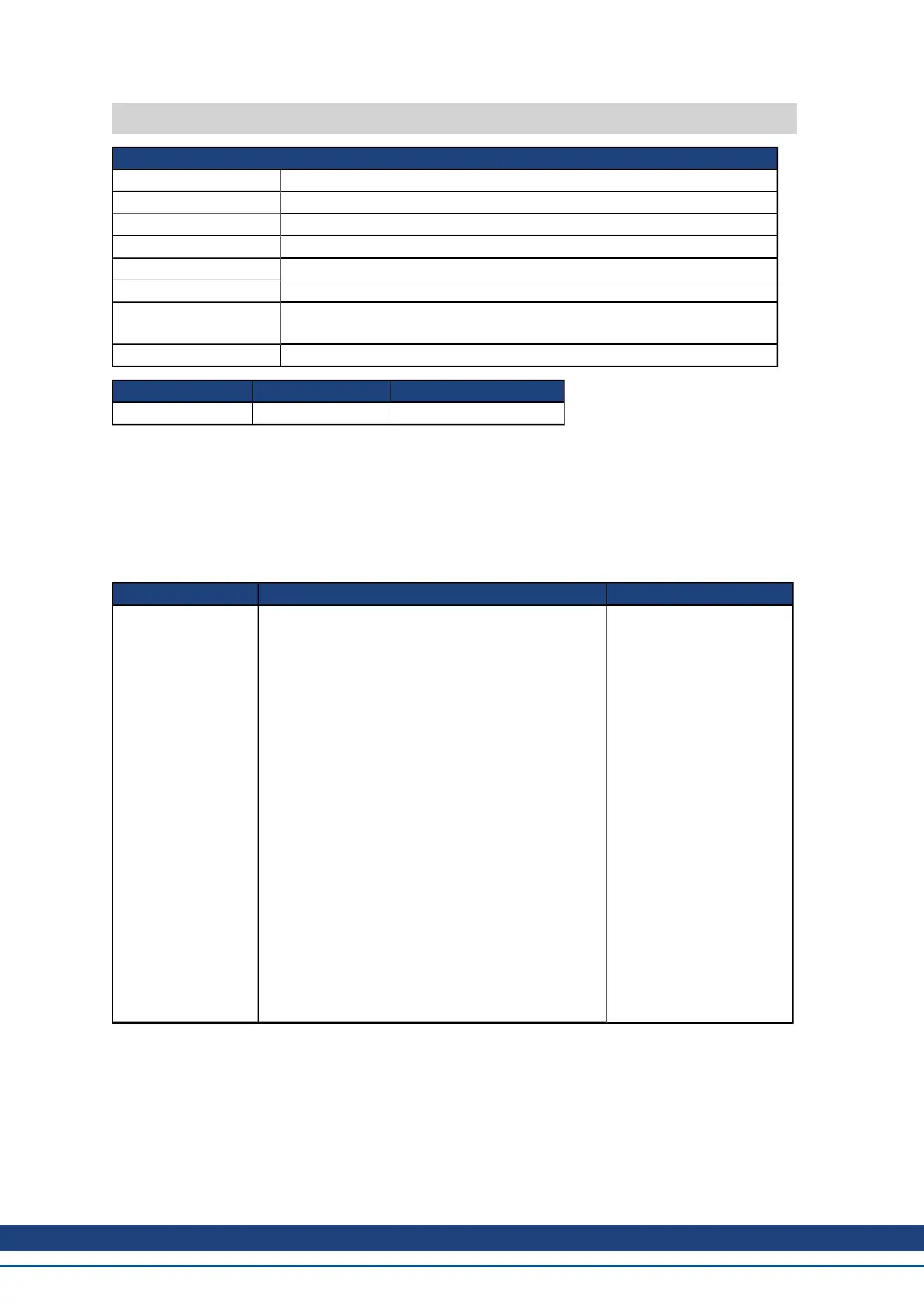
SM.MODE
General Information
Type R/W Parameter
Description Sets the service motion mode.
Units N/A
Range 0 to 1
Default Value 0
Data Type Integer
See Also
SM.I1, SM.I2, SM.MOVE, SM.T1 SM.T2, SM.V1, SM.V2,
DRV.ACCDRV.DEC
Start Version M_01-01-00-000
Fieldbus Index/Subindex Object Start Version
Modbus 750 M_01-03-00-000
Description
SM.MODE defines the mode of service motion for each loop. Two types of service motion are available :
1. A constant motion in one direction (endless or for a certain amount of time).
2. An alternating motion.
The possible modes for this parameter are described in the following table:
SM.MODE Description Requirements
0
Constant motion in closed current loop mode of
operation.
l DRV.OPMODE 0:
The drive generates a constant current com-
mand value (SM.I1) for a certain amount of
time (if SM.T1>0) or endless (if SM.T1=0).
The drive will not generate any ramps in this
mode of operation.
l DRV.OPMODE 1 or 2:
The drive generates a constant velocity com-
mand value (SM.V1) for a certain amount of
time (if SM.T1>0) or endless (if SM.T1=0).
The drive generates acceleration and decel-
eration ramps according to the DRV.ACC
and DRV.DEC setting in this mode of oper-
ation.
The service motion can be stopped by using the
DRV.STOP command.
DRV.OPMODE = 0,1, or 2
DRV.CMDSOURCE = 0
AKD User Guide | SM Parameters
Kollmorgen | December 2010 591
 Loading...
Loading...









