AKD User Guide | SM Parameters
SM.MODE Description Requirements
1
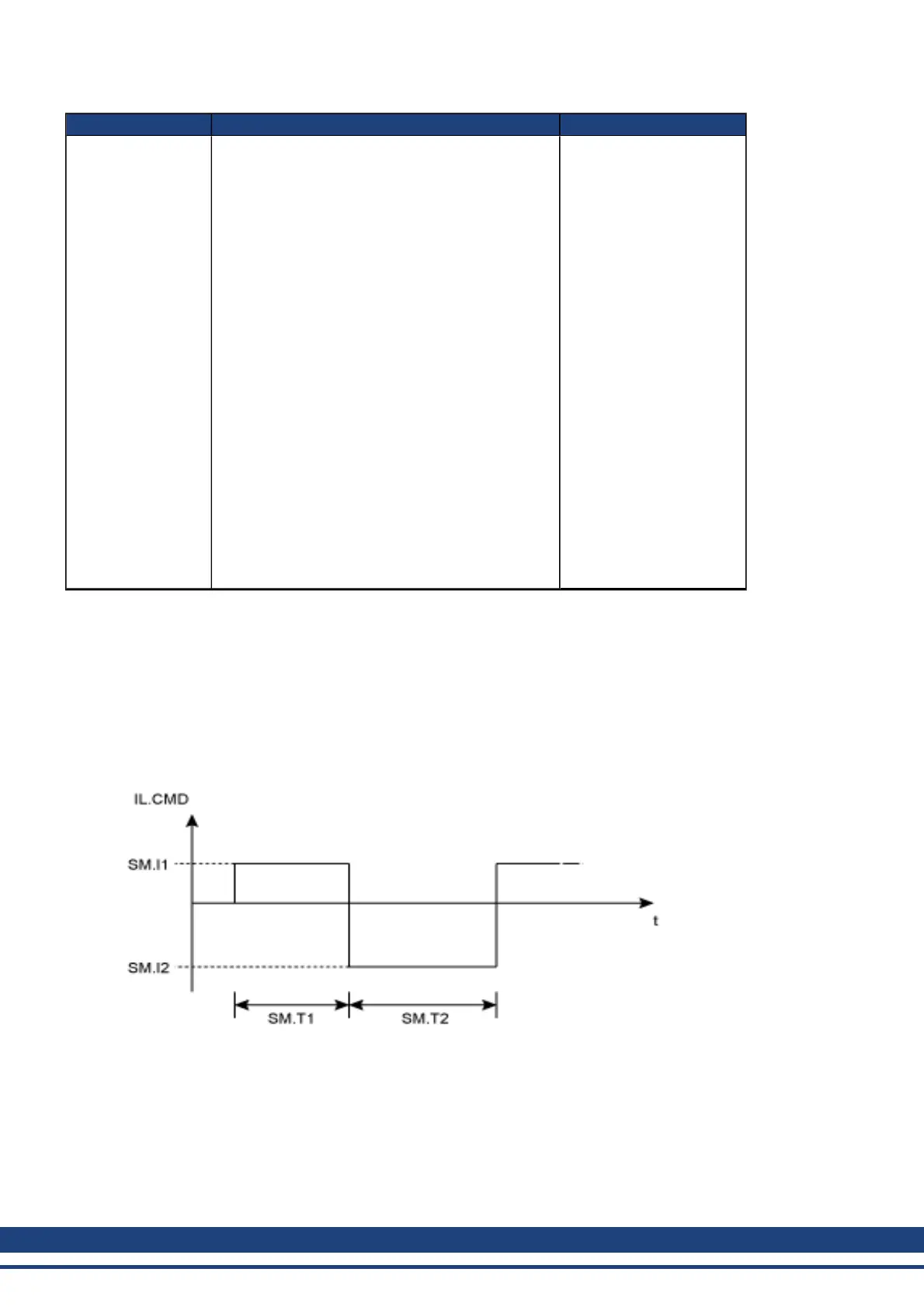
l DRV.OPMODE 0:
The drive generates a current command
value (SM.I1) for a certain amount of time
(SM.T1). Afterwards the drive generates a
current command value (SM.I2) for another
certain amount of time (SM.T2). This
sequence is repeated as long as a
DRV.STOP command occurs. The drive will
not generate any ramps in this mode of oper-
ation.
l DRV.OPMODE 1 or 2:
The drive generates a velocity command
value (SM.V1) for a certain amount of time
(SM.T1). Afterwards the drive generates a
velocity command value (SM.V2) for another
certain amount of time (SM.T2). This
sequence is repeated as long as a
DRV.STOP command occurs. The drive will
generate an acceleration and deceleration
ramps according to the DRV.ACC and
DRV.DEC setting in this mode of operation.
DRV.OPMODE = 0, 1, or 2
DRV.CMDSOURCE = 0
Ramps
The drive uses DRV.ACC and DRV.DEC for the ramps in DRV.OPMODE 1 (closed velocity) and 2 (closed posi-
tion). The drive does not generate any ramps in service motion mode 0 and 1.
Service Motion for DRV.OPMODE 0 and SM.MODE 1
Service motion for DRV.OPMODE 1 or 2 and SM.MODE 1
592 Kollmorgen | December 2010

 Loading...
Loading...






