DRV.OPMODE
General Information
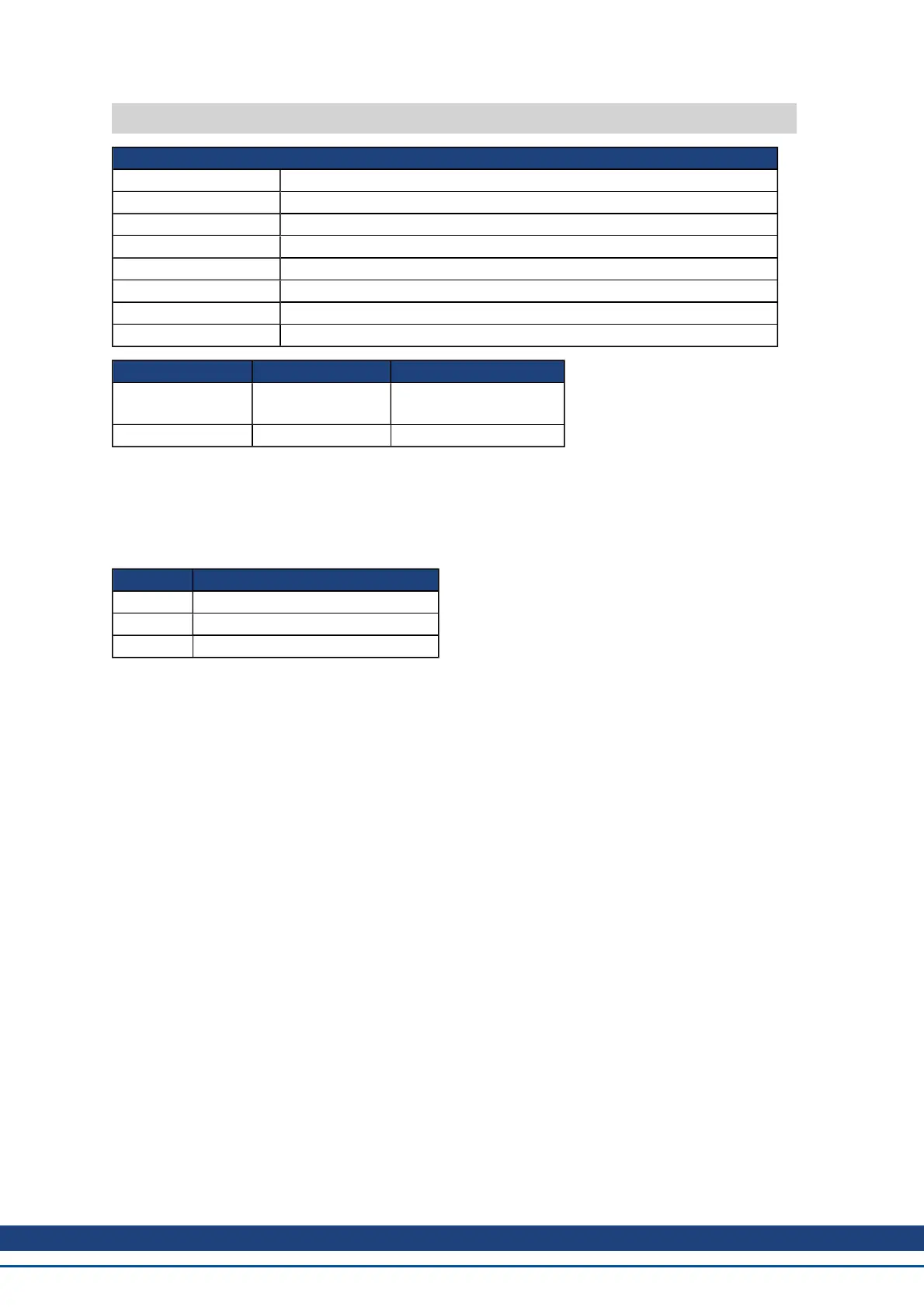
Type NV Parameter
Description Sets the drive operation mode (current, velocity, or position).
Units N/A
Range 0 to 2
Default Value 0
Data Type Integer
See Also DRV.CMDSOURCE
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
35B4h/0 M_01-00-00-000
Modbus 270 M_01-03-00-000
Description
DRV.OPMODE specifies the operation mode of the drive. You must also use DRV.CMDSOURCE to set the
source of the command to the drive.
The operation mode values can be set as follows:
Mode Description
0 Current (torque) operation mode
1 Velocity operation mode
2 Position operation mode
DRV.OPMODE can be changed while the drive is enabled or disabled. If you are using the terminal to change
the operation mode, then it is recommended that you disable the drive before changing the operation mode. If
you change the operation mode from the terminal while the drive is enabled, the system may experience a step
change in demand.
Example
Set the source of the command to a TCP/IP channel and the desired operation mode to velocity:
-->DRV.CMDSOURCE 0
-->DRV.OPMODE 1
Related Topics
11 Using Command Source and Operating Modes
10.10 Controlled Stop
11.3 Current Loop
10.1 Digital Inputs and Outputs
11.4 Velocity Loop
11.5 Position Loop
8.3.9 Using Wake and Shake (WS)
AKD User Guide | DRV Parameters and Commands
Kollmorgen | December 2010 385
 Loading...
Loading...









