19.17.3 Emulated Encoder Output (EEO) - A quad B (X9)
The drive calculates the motor shaft position from the cyclic- absolute signals of the primary feedback, gen-
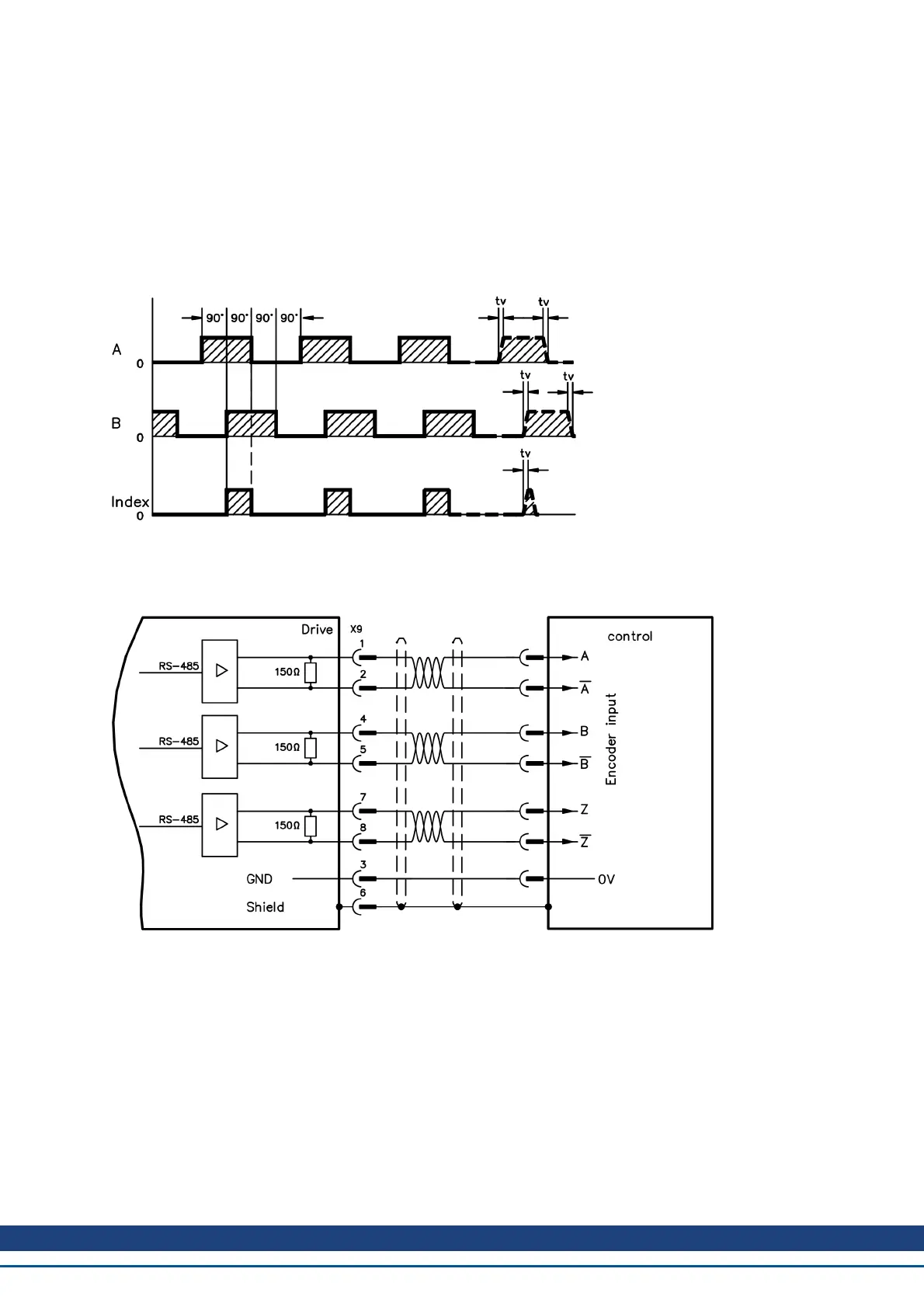
erating incremental-encoder compatible pulses from this information. Pulse outputs on the SubD connector X9
are 3 signals, A, B and Index, with 90° phase difference (i.e. in quadrature, hence the alternative term “A quad B”
output), with a zero pulse.
The resolution (before multiplication) can be set by the DRV.EMUERES parameter. Use the DRV.EMU-
EZOFFSET parameter to adjust + save the zero pulse position within one mechanical turn. The drivers operate
from an internal supply voltage.
tv max. 30ns
Connection Diagram
AKD User Guide | Connection Diagrams
Kollmorgen | December 2010 243
 Loading...
Loading...









