AKD User Guide | VL Parameters
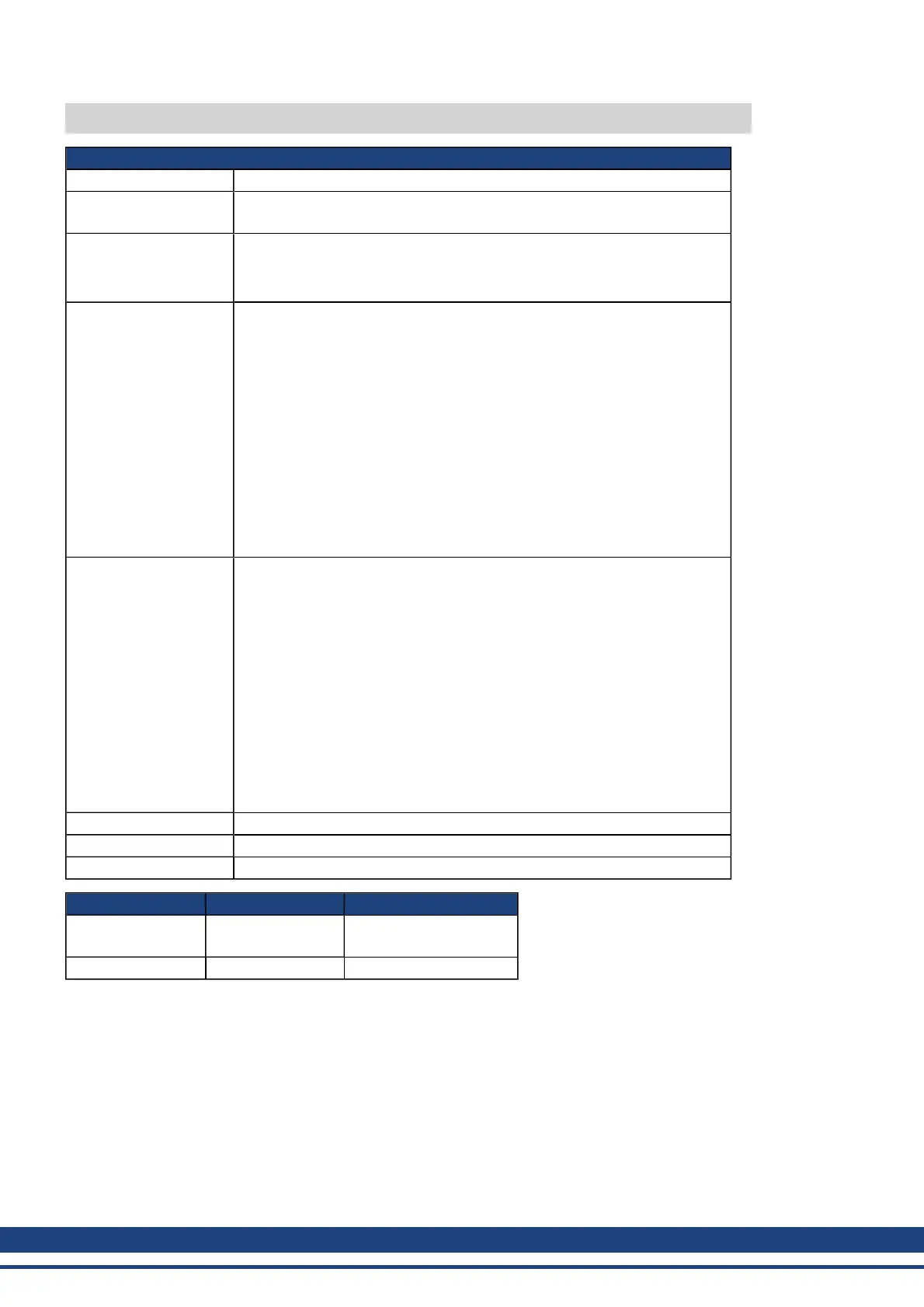
VL.THRESH
General Information
Type NV Parameter
Description
Sets the over speed fault value; active in opmodes 1 (velocity) and 2 (posi-
tion) only.
Units
Depends on UNIT.VROTARY or UNIT.VLINEAR
Rotary: rpm, rps, deg/s, (PIN/POUT)/s, rad/s
Linear: counts/s, mm/s, µm/s, (PIN/POUT)/s
Range
Rotary:
0 to 12,000.000 rpm
0 to 200.000 rps
0 to 72,000.000 deg/s
0 to 1,000.000 (PIN/POUT)/s
0.000 to 1,256.637 rad/s
Linear:
0.000 to 0.200 counts/s
0.000 to 200.000*MOTOR.PITCH mm/sec
0.000 to 200,000.000*MOTOR.PITCH µm/s
0 to 1,000.000 (PIN/POUT)/s
Default Value
Rotary:
3,600 rpm
60 rps
21,600.000 deg/s
300.000 (PIN/POUT)/s
376.991 rad/s
Linear:
0.060 counts/s
60.000*MOTOR.PITCH mm/sec
60,000.04*MOTOR.PITCHMOTOR.PITCHµm/s
300.000 (PIN/POUT)/s
Data Type Float
See Also VL.CMD, VL.CMDU
Start Version M_01-00-00-000
Fieldbus Index/Subindex Object Start Version
EtherCAT COE
and CANopen
3627h/0 M_01-00-00-000
Modbus 888 M_01-03-00-000
Description
VL.THRESH sets the threshold for the velocity over which an over speed fault is generated.
The value is considered as an absolute value, hence it applies for both negative and positive velocities.
Example
VL.THRESH is set to 600 rpm. A velocity command of 700 rpm will generate an over speed fault.
Related Topics
11.4 Velocity Loop
648 Kollmorgen | December 2010

 Loading...
Loading...






