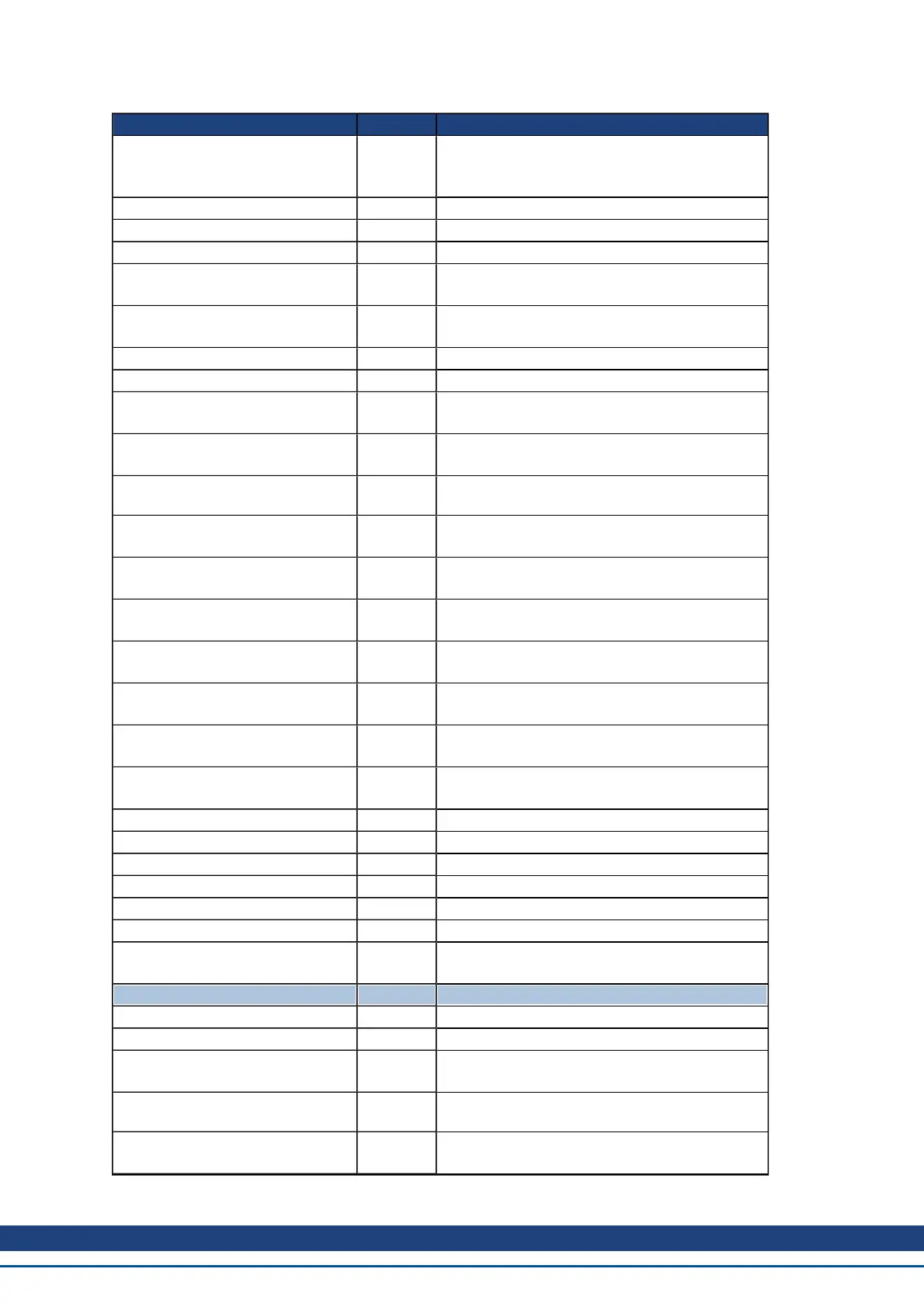
Parameter or Command Type Description
DRV.HELPALL R/O
Retrieves the minimum, maximum, default, and
actual values for all available parameters and
commands.
DRV.ICONT R/O Reads the continuous rated current value.
DRV.INFO R/O Reads general information about the drive.
DRV.IPEAK R/O Reads the peak rated current value.
DRV.IZERO R/W
Sets the current that will be used during the
DRV.ZERO procedure.
DRV.LIST R/O
Reads the list of available parameters and com-
mands.
DRV.LOGICVOLTS Reads the logic voltages.
DRV.NAME NV Sets and reads the name of the drive.
DRV.NVLIST R/O
Lists the NV parameters and values from the
RAM.
DRV.NVLOAD W/O
Loads all data from the NV memory of the drive
into the RAM parameters.
DRV.NVSAVE Command
Saves the drive parameters from the RAM to the
NV memory.
DRV.ONTIME R/O
Returns how long the drive has been running
since last power up.
DRV.OPMODE NV
Sets the drive operation mode (current, velocity,
or position).
DRV.READFORMAT R/W
Sets the value returned to either decimal or hex-
adecimal.
DRV.RSTVAR Command
Sets default values in the drive without re-booting
the drive and without resetting the NV memory.
DRV.RUNTIME R/O
Returns how long the drive has been running
since first activated.
DRV.SETUPREQBITS R/O
Reads the bitwise set status of parameters that
must be set before the drive can be enabled
DRV.SETUPREQLIST R/O
Reads the list of parameters that must be set
before the drive can be enabled.
DRV.STOP Command This command stops all drive motion.
DRV.TEMPERATURES R/O Reads the temperature of drive components.
DRV.VER R/O Reads the drive version.
DRV.VERIMAGE R/O Returns the version data from each image.
DRV.TEMPERATURES R/O Reads the temperature of drive components.
DRV.WARNINGS R/O Reads the active warnings.
DRV.ZERO R/W
Sets the zero mode. The procedure is activated
when the drive is enabled.
Feedback (FB1)
FB1.ENCRES NV Sets the resolution of the motor encoder.
FB1.HALLSTATE R/O Reads the Hall switch values (encoder feedback
FB1.IDENTIFIED R/O
Reads the type of feedback device used by the
drive/motor.
FB1.INITSIGNED NV
Sets initial feedback value as signed or
unsigned.
FB1.LDLL R/O
Reads the motor line-to-line inductance from the
FPGA.
AKD User Guide | About the Parameter and Command Reference Guide
Kollmorgen | December 2010 257
 Loading...
Loading...









