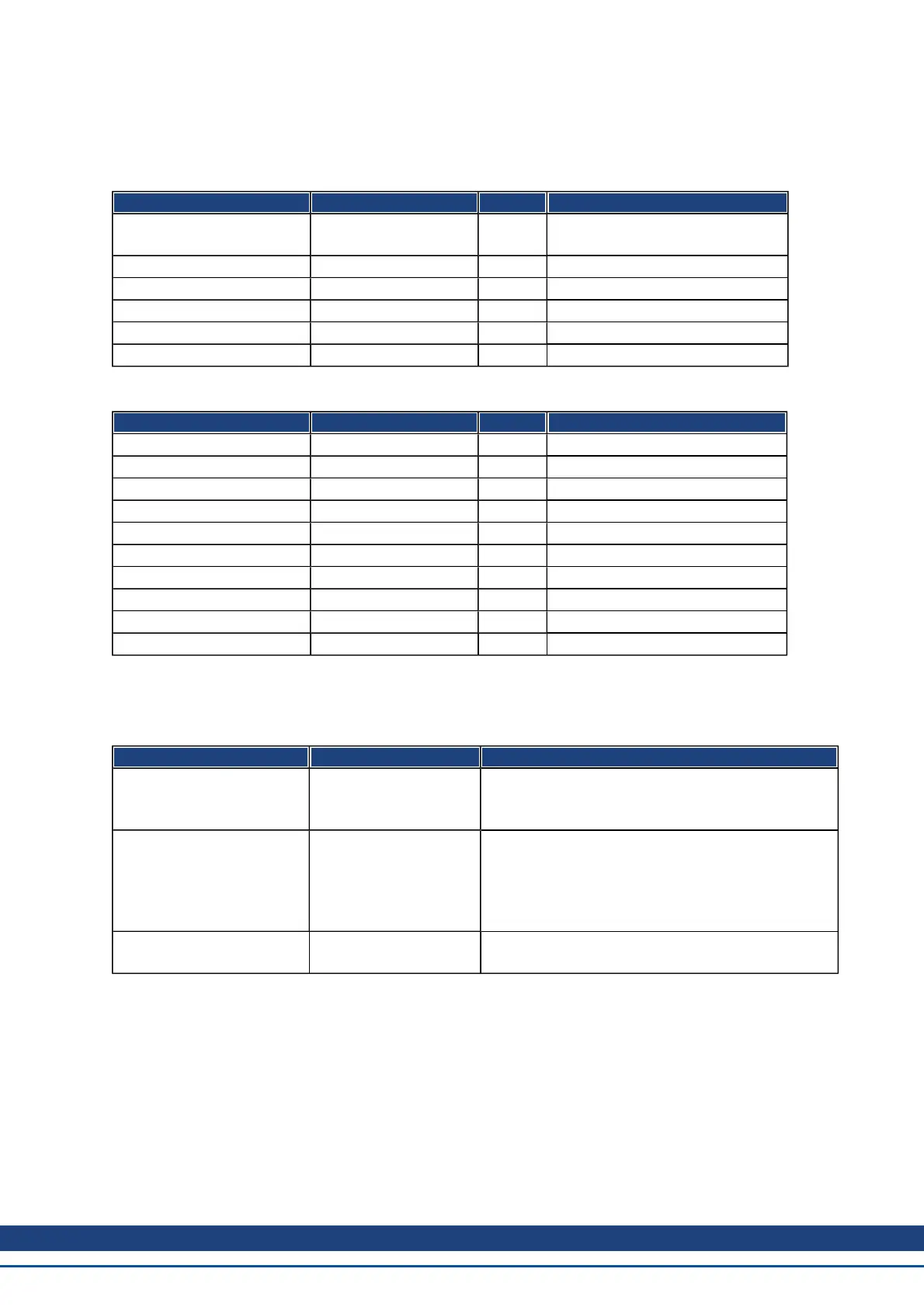
21.4.6 Supported Cyclical Setpoint and Actual Values
Supported cyclical setpoint values
Name CANopen object number Data type Description
Position command value 0x60C1 sub 1 INT32 Interpolation data record in IP-
mode
Velocity command value 0x60FF sub 0 INT32
CANopen control-word 0x6040 sub 0 UINT16 CANopen control word.
Latch Control word 0x20a4 sub 0 UINT16
Torque feed forward 0x60B2 sub 0 INT16
Digital outputs 0x60FE sub 1 UINT32
Supported cyclical actual values
Name CANopen object number Data type Description
Position actual internal value 0x6063 sub 0 INT32
Velocity actual value 0x606c sub 0 INT32
CANopen status-word 0x6041 sub 0 UINT16 CANopen status word.
Second position feedback 2050 sub 0 INT32
Digital inputs 60FD sub 0 UINT32
Following error actual value 60F4 sub 0 INT32
Latch position positive edge 20a0 sub 0 INT32
Torque actual value 6077 sub 0 INT16
Latch status 20A5 sub 0 UINT16
Analog input value 3470 sub 0 INT16
21.4.7 Supported Operation Modes
CANopen mode of operation AKD mode of operation Description
Profile velocity DRV.OPMODE 2
DRC.CMDSOURCE 1
0x6060Sub0 Data: 3
In this mode of operation the EtherCAT master
sends cyclic velocity command values to the AKD.
Interpolated position DRV.OPMODE 2
DRV.CMDSOURCE 1
0x6060Sub0 Data: 7
In this mode of operation the EtherCAT master
sends cyclic position command values to the AKD.
These command values are interpolated by the AKD
according to the fieldbus sample rate.
Homing mode DRV.OPMODE 2
DRV.CMDSOURCE 0
0x6060 sub 0 data : 6
In this mode an AKD-internal homing can be done.
AKD User Guide |
Kollmorgen | December 2010 54
 Loading...
Loading...









