AKD User Guide | 17 Faults and Warnings
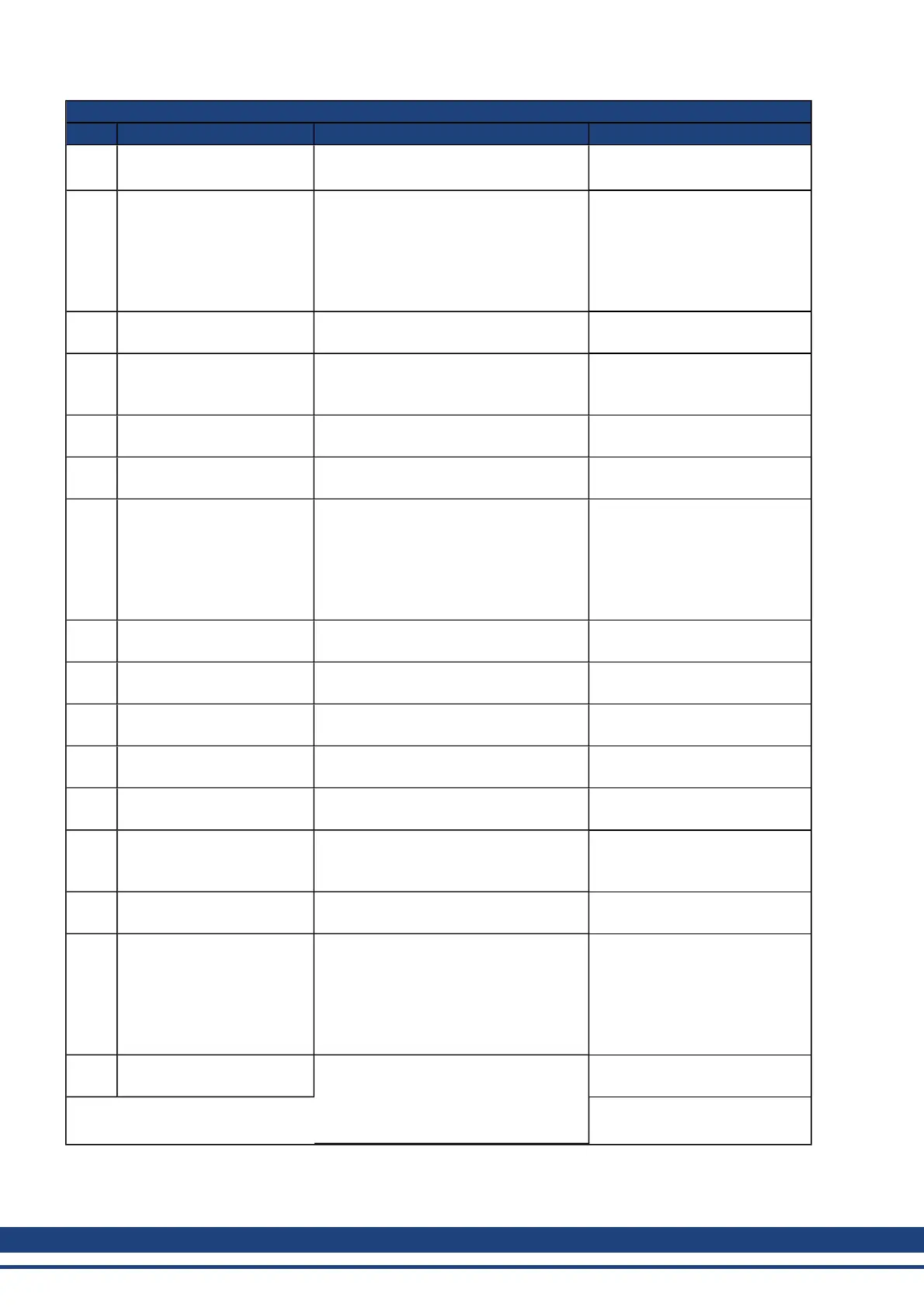
Fault Message/Warning Cause Remedy
240 to
243
Temperature sensor low.
Warning issued prior to fault.
Low temperature limit reached. Check cabinet ventilation sys-
tem.
245 External fault. This fault is user generated and is
caused by user settings.
Users can configure a digital
input to trigger this fault
(DINx.MODE = 10). The fault
occurs according to this input
setting. Clear the input to clear
the fault.
247 Bus voltage exceed allowed
thresholds.
Hardware problem in bus measurement. Troubleshoot and repair hard-
ware problem.
301 Motor overheated.
Warning issued prior to fault.
Motor overheated. Check ambient temperature.
Check motor mounting heat sink
capability
302 Over speed. Motor exceeded VL.THRESH value. Look for overshoot or lower
requested speed.
303 Runaway. Motor did not follow command values. Gains are too low; motor is being
over driven.
304 Motor foldback.
Warning issued prior to fault.
Maximum motor power has been
exceeded; the power has been limited to
protect the motor
Motion is requiring too much
power. Change move profile to
reduce load on motor. Check for
load jamming or sticking. Check
that current limits are set cor-
rectly.
305 Brake open circuit. Motor brake open circuit. Check cabling and general func-
tionality.
306 Brake short circuit. Motor brake short circuit. Check cabling and general func-
tionality.
307 Brake closed during enable
state.
Motor brake closed unexpectedly. Check cabling and general func-
tionality.
308 Voltage exceeds motor rat-
ing.
Drive bus voltage exceeds the motor’s
defined voltage rating.
Make sure that the motor fits the
driving rating.
401 Failed to set feedback type. Feedback is not connected or wrong
feedback type selected
Check primary feedback (X10
connection).
402 Analog signal amplitude
fault.
Analog signal amplitude is too low.
Analog fault (resolver signal amplitude or
sin/cos amplitude)
Check primary feedback (X10
connection), resolver and
sine/cos encoder only.
403 EnDat communication fault. General communication problem with
feedback.
Check primary feedback (X10
connection), EnDat only
404 Hall error. Hall sensor returns invalid Hall state
(111, 000); either all Hall sensors are on
or off. Legal Hall states are 001, 011,
010, 110, 100, and 101. This fault can be
caused by a broken connection in any
one of the Hall signals.
Check the feedback wiring;
check all feedback connectors
to ensure all pins are positioned
correctly.
405 BiSS watchdog fault. Bad communication with the feedback
device.
Check primary feedback (X10
connection), Biss only.
212 Kollmorgen | December 2010

 Loading...
Loading...






