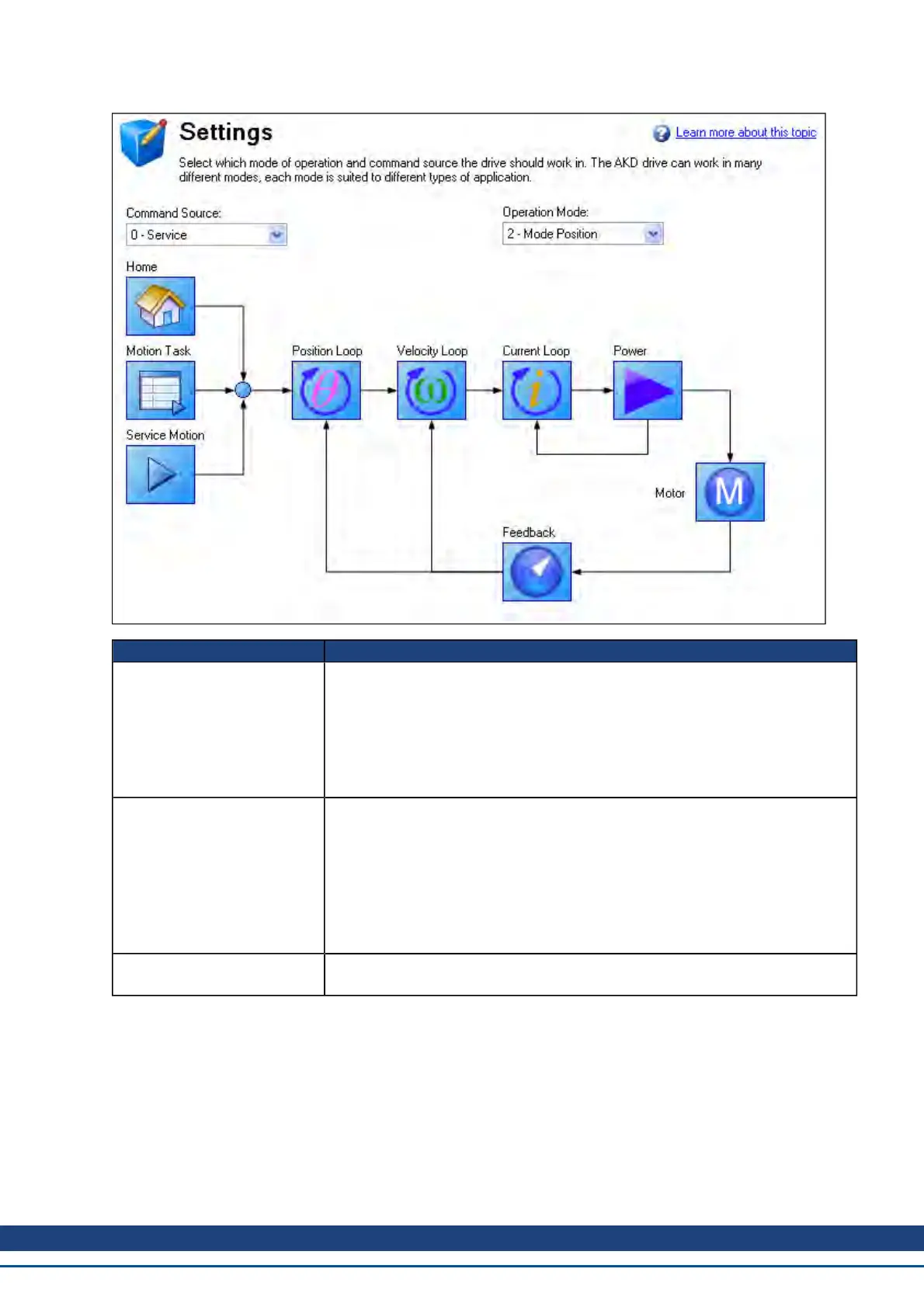
Button or Dialog Box Description
Command Source
Selects where the command is being provided:
0-Service: You communicate with the drive using the TCP/IP service channel.
1-Fieldbus: The drive is being controlled by commands coming over the field-
bus.
2-Gearing: The position is proportional to the secondary feedback.
3-Analog: The analog input provides a current, velocity, or position command.
Operation Mode
Selects the control loop being commanded from the source:
0-Torque Mode: Drive controls are based on the current passing through the
motor. For a rotary motor, this value is proportional to the torque of the motor; for
linear motors, this value is proportional to the force the motor generates.
1-Velocity Mode: Drive controls are based on the velocity of the motor.
2-Position Mode: Drive controls are based on the position of the motor.
Motion and Control Loop
Graphics
Allows you to selects the details related to each specific loop from a graphical
interface.
See 11 Using Command Source and Operating Modes for details on configuring the drive for your application.
AKD User Guide | 6 Using WorkBench
Kollmorgen | December 2010 49

 Loading...
Loading...






