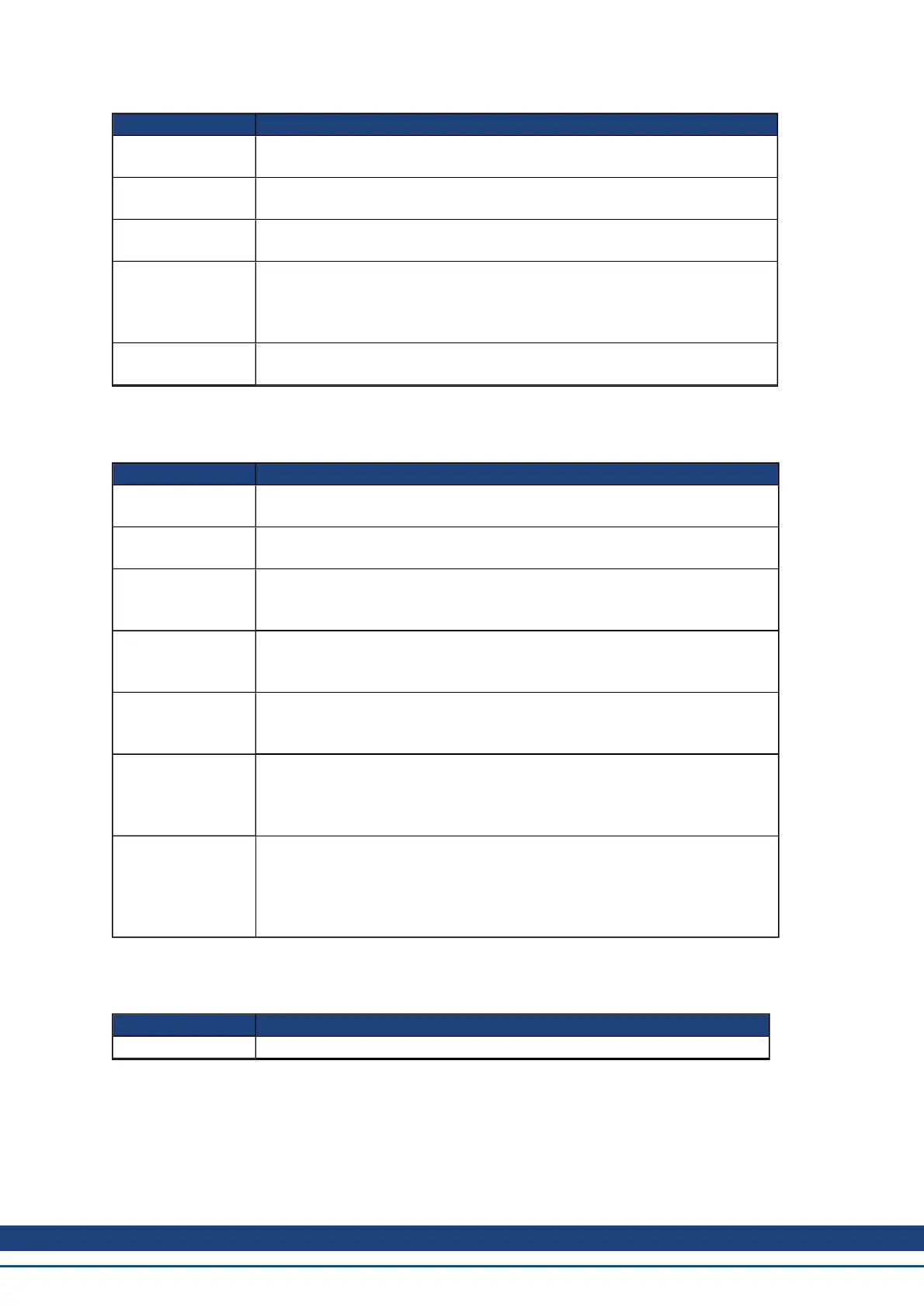
Bits 3, 2, 1, 0 Description
1000
Absolute MT. The target position is defined by an external source, such as an
analog input.
0001
Relative MT. The target position is defined as:
Target position = PL.CMD + MT.P
0011
Relative MT. The target position is defined as:
Target position = Target position of the last motion task + MT.P
0101
Relative MT. The target position is defined as:
Target position = External start position + MT.P
The ‘external start position’ can be generated by a latched position,
analog input, and other sources.
0111
Relative MT. The target position is defined as:
Target position = PL.FB + MT.P
Table 3: Next MT Start Type
Bits 9, 8, 7, 6, 5 Description
00000
Switches over to next MT after stopping. After an MT ends, the next MT starts
immediately.
00001
Switches over to next MT after stopping and delay. After an MT ends, the MT
following time (MT.TNEXTelapse in order to start the next MT.
00010
Switches over to next MT after stopping and external event. After an MT ends,
an external event (such as a high digital input) must occur in order to start the
next MT.
00011
Switches over to next MT after stopping, delay, and external event. After an
MT ends, the MT.TNEXTmust elapse and an external event (such as a high
digital input) must occur in order to start the next MT.
00111
Switches over to next MT after stopping, then delay or external event. After an
MT ends, the MT.TNEXT must elapse or an external event (such as a high dig-
ital input) must occur in order to start the next MT.
10000
Switches over to the next MT at present MT speed (change on the fly). After
reaching the target position of an MT, the next MT starts. The drive then accel-
erates with the adjusted acceleration ramp of this next MT to the target veloc-
ity of this next MT. The MT.TNEXT setting is ignored.
11000
Switches over to the next MT at next MT speed (change on the fly).When the
target position of an MT is reached, the drive has already accelerated with the
acceleration ramp of the next MT to the target velocity of the next MT. Thus,
the drive begins the next MT at the next MT target velocity. The MT.TNEXT
setting is ignored if adjusted.
Table 4: MT Acceleration Type
Bits 11, 10 Description
00 Trapezoidal acceleration and deceleration.
AKD User Guide | MT Parameters and Commands
Kollmorgen | December 2010 517
 Loading...
Loading...









