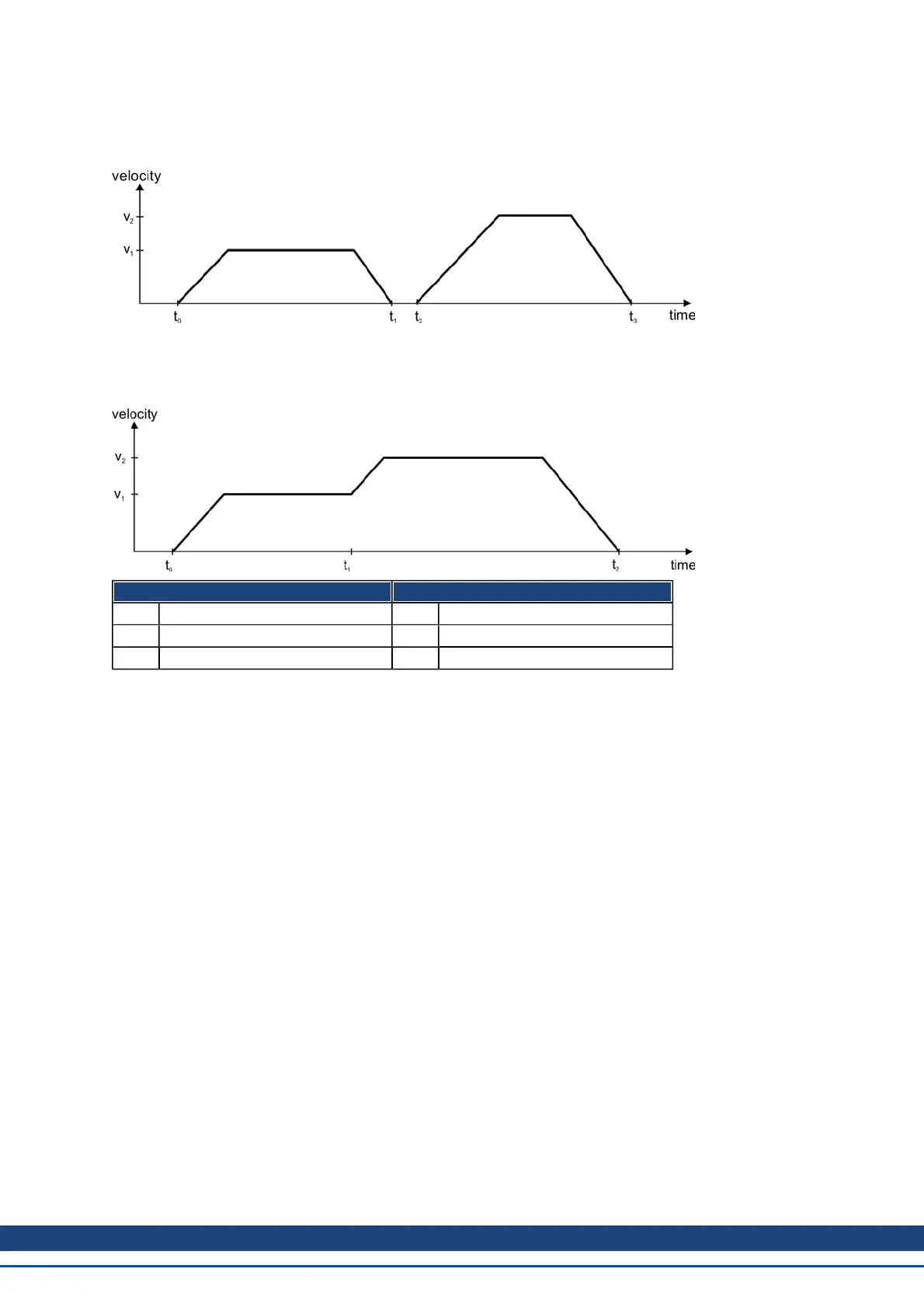
In the figure below this mechanism results in a velocity of zero after ramping down to reach a target_position X1
at t1. After signaling to the host, that the setpoint has been reached as described above, the next target_position
is processed at t2 and reached at t3.
With change_set_immediately set to "1" (6), the host instructs the drive to apply a new setpoint immediately
after reaching the previous one. The relative timing of the other signals is unchanged. This behavior causes the
drive to process the next setpoint X2 in advance, and to hold its velocity when it reaches the target_position X1
at t1. The drive then moves immediately to the next target_position X2 that has already been calculated.
Bits in the control word: Bits in the status word:
Bit 4 new_setpoint (positive edge!) Bit 12 setpoint acknowledge
Bit 5 change_set_immediately Bit 13 lag/following error
Bit 6 absolute/relative
Notes on motion task type relative:
If Bit 6 is set, then the motion task type is relative, and activated according to the last target position or actual
position. If other types of relative motion are required, these must be activated in advance through the ASCII-
object O_C (Object 35B9 sub 1).
Notes on profile position mode:
Functional description for the profile position mode
The drive profile DS402 distinguishes between two methods of moving to a target position. These two methods
are controlled by the bits for new_setpoint and change_set_immediately in the control word, and setpoint_
acknowledge in the status word. These bits can be used to prepare a motion task while another is still being car-
ried out (handshake).
Moving to several target positions without an intermediate halt
After the target position has been reached, the drive moves immediately to the next target position. This requires
that new setpoints are signaled to the drive. This is done through a positive transition of the new_setpoint bit. In
this case, the setpoint_acknowledge bit must not be active (=1) in the status word (see also Handshake DS402).
The velocity is not reduced to zero when the first setpoint is reached.
Moving to a single target position
The drive moves to the target position, whereby the velocity is reduced to zero. Reaching the target position is
signaled by the bit for target_reached in the status word.
AKD User Guide |
Kollmorgen | December 2010 118

 Loading...
Loading...






