AKD User Guide |
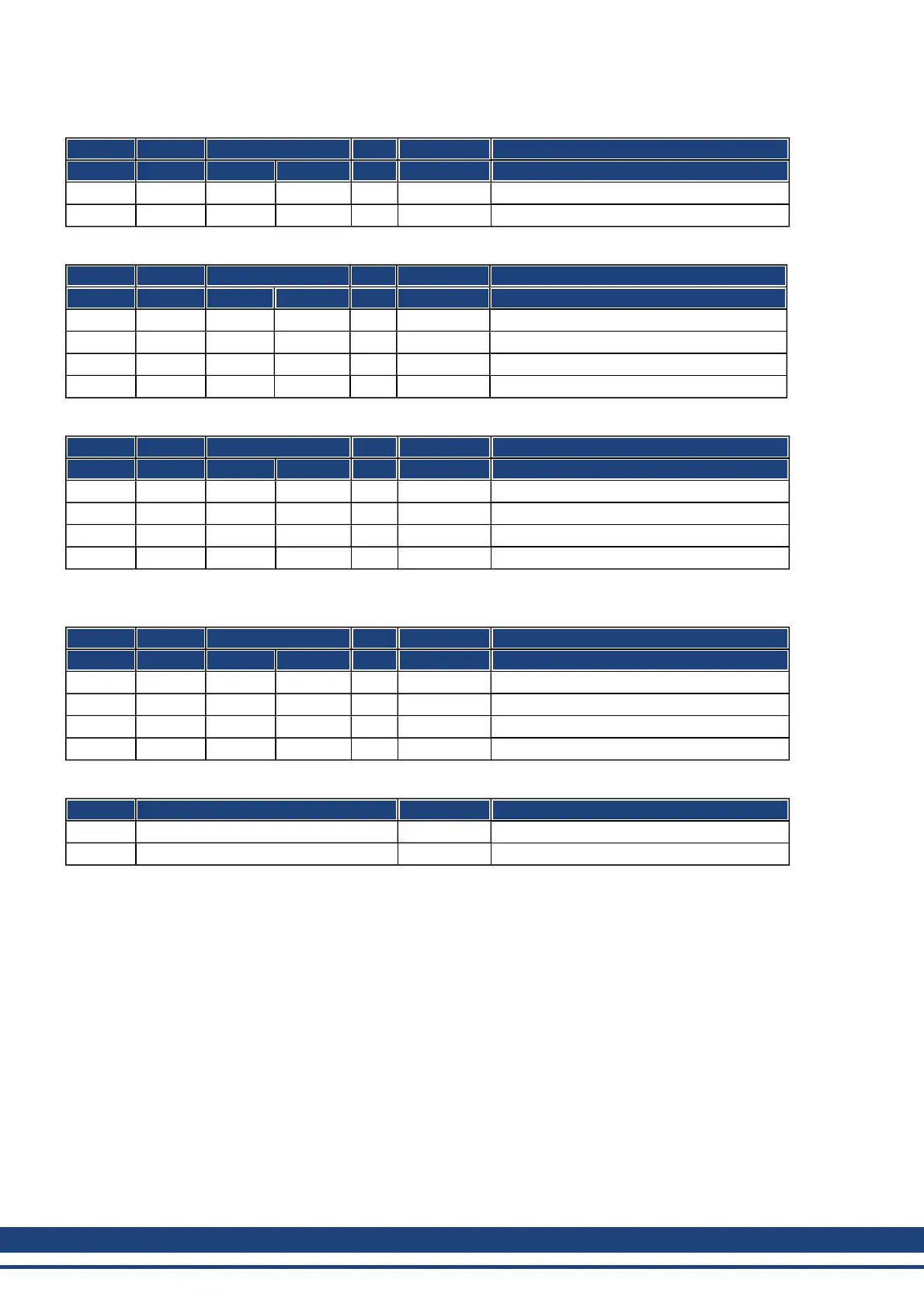
The second TPDO should be sent with every SYNC by the servoamplifier.
COB-ID Control Index Sub- Data Comment
byte Low byte High byte index
603 2F 01 18 02h 01 00 00 00 TPDO2 with every SYNC
583 60 01 18 02h 00 00 00 00 response telegram
Disable unused TPDOs
COB-ID Control Index Sub- Data Comment
byte Low byte High byte index
603 23 02 18 01h 83 03 00 80 disable TPDO3
583 60 02 18 01h 00 00 00 00 response telegram
603 23 03 18 01h 83 04 00 80 disable TPDO4
583 60 03 18 01h 00 00 00 00 response telegram
Disable unused RPDOs
COB-ID Control Index Sub- Data Comment
byte Low byte High byte index
603 23 02 14 01h 03 04 00 80 disable RPDO3
583 60 02 14 01h 00 00 00 00 response telegram
603 23 03 14 01h 03 05 00 80 disable RPDO4
583 60 03 14 01h 00 00 00 00 response telegram
Define mechanical resolution via Object 6092h, Subindex 01h and 02h. Default values are the motion specific fac-
tors PGEARI and PGEARO:
COB-ID Control Index Sub- Data Comment
byte Low byte High byte index
603 23 93 60 01h 00 00 10 00 2E20 increments
583 60 93 60 01h 00 00 00 00 response telegram
603 23 93 60 02h A0 8C 00 00 3600 user units
583 60 93 60 02h 00 00 00 00 response telegram
After defining the PDOs they can be released with the NMT:
COB-ID Data Comment
000 01 03 enable NMT
183 40 02 profile status
141 Kollmorgen | December 2010

 Loading...
Loading...






