AKD User Guide |
Emergency-Object
If, for instance, the resolver connector is disconnected, a serious error will be caused in the controller. This
results in an Emergency telegram.
COB-ID Emergency error Error
register
Low High
081 10 43 08 00 00 00 00 motor temperature, temperature, manufacturer specific
081 00 00 88 00 00 00 00
20.7.2.2 Examples, special applications
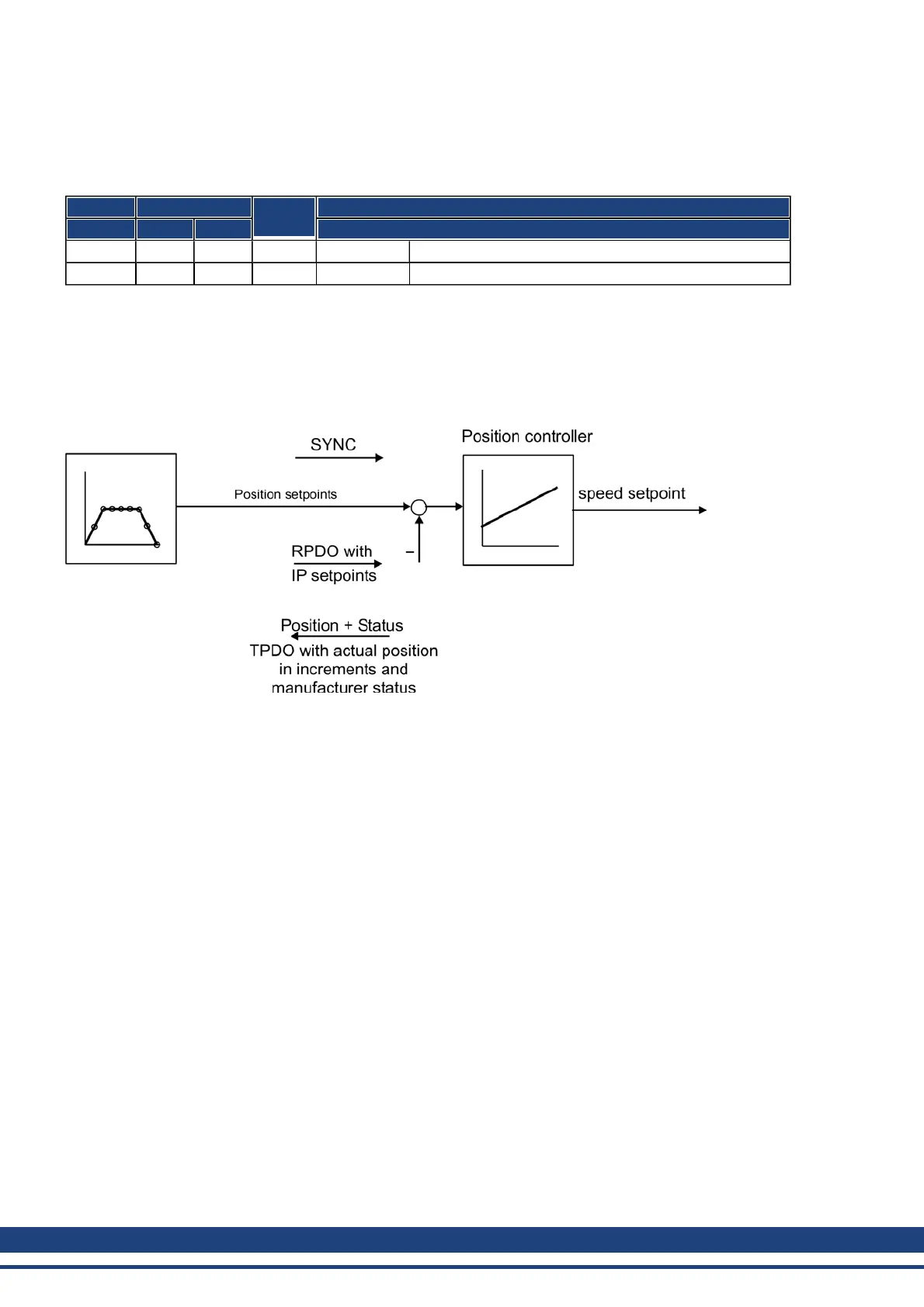
Example: External Trajectory with Interpolated Position Mode
This example shows the possible application for giving two axes position setpoints within one PDO.
Controller structure for the position controller within the drive:
All data are hexadecimal. In the example, the two axes in the system have the station addresses 1 and 2.
Before you begin this procedure, complete the following items:
l The internal syncronisation must be used for the IP-mode.For that purpose the parameter SYNCSRC
(Object 3683 sub 1) must be set to 3.
l The parameters must be saved to EEPROM.
l A coldstart must be done to enable the syncronisation possibility.
l The axes are homed (for this example).
The common PDO contains 2 IP (interolpated position) – setpoints and can be transmitted simultaneously to two
stations, whereby each station can extract the relevant data. The other data can be made ignored by using
dummy entries (Object 2100 sub 0). For this purpose both axes must react on the same RPDO-COB-ID.
145 Kollmorgen | December 2010

 Loading...
Loading...






