In order to be able to make trajectory movements, both drives must be operating in the appropriate mode. This is
set through Index 6060h:
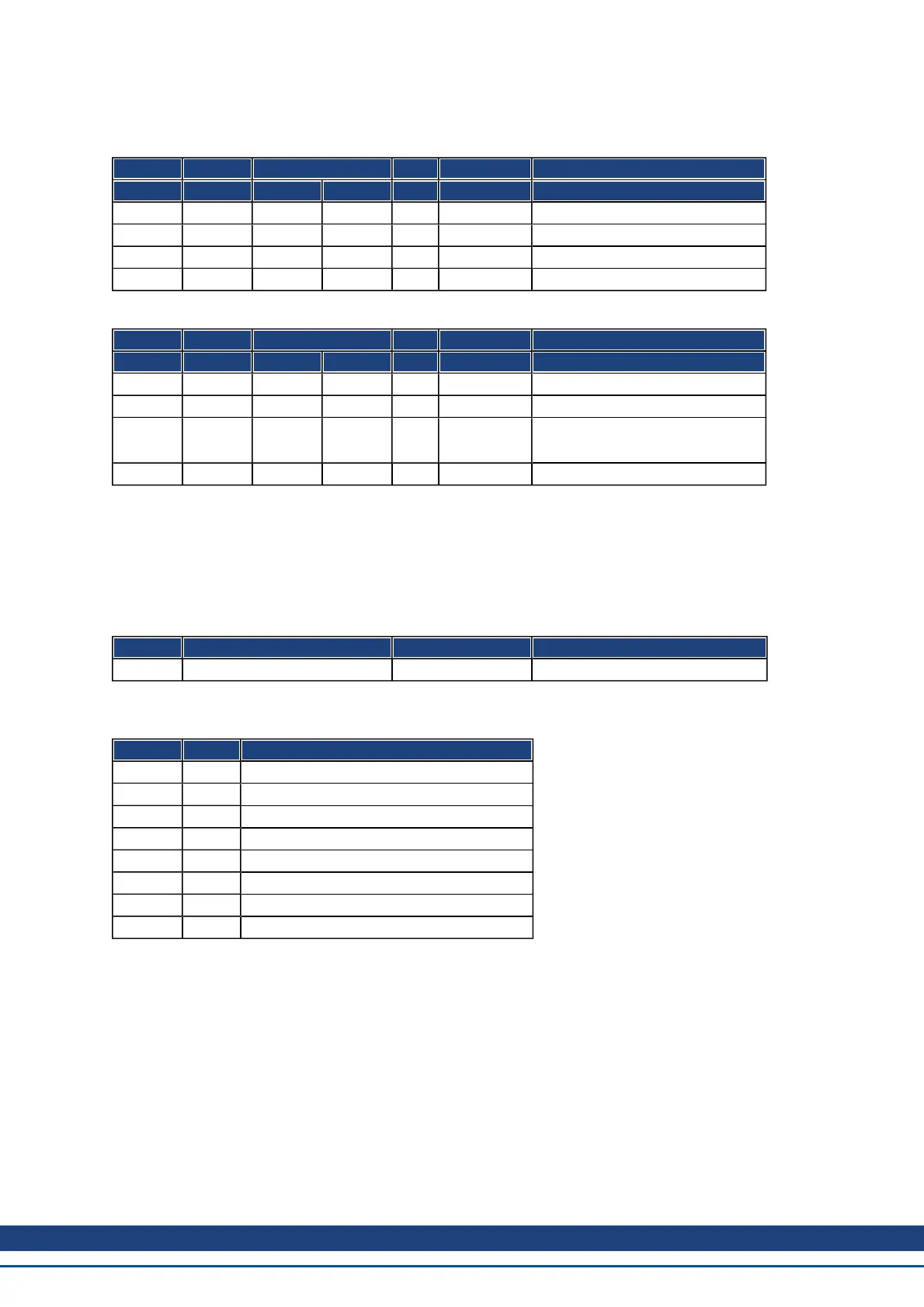
COB-ID Control Index Sub- Data Comment
byte Low byte High byte index
601 2F 60 60 00h 07 00 00 00 Set IP mode for axis 1
581 60 60 60 00h 00 00 00 00
602 2F 60 60 00h 07 00 00 00 Set IP mode for axis 2
582 60 60 60 00h 00 00 00 00
The cycle interval for the IP-mode shall be 1 ms. This must be defined with Object 60C1 sub 1 and 2:
COB-ID Control Index Sub- Data Comment
byte Low byte High byte index
601 2F C2 60 01h 01 00 00 00 Interpolation time unit 1
581 60 C2 60 01h 00 00 00 00
601 2F C2 60 02h FD 00 00 00 Interpolation time index -3 ->
Cycle time = 1 * 10
-3
s
581 60 C2 60 02h 00 00 00 00
The same must be done for axis 2.
To start up the axes, the drives must be put into the operational status (operation enable) and the network man-
agement functions must be started.
The network management functions enable the application of the Process Data Objects (PDOs) and are initia
lized by the following telegram for both axes:
Switch the NMT (Network Management) status machine to operation enable:
COB-ID Command specifier (CS) Node-ID Comment
0 1 1 NMT enable for all axes
Next, power is applied to each drive, and they are put into the operation enable condition. This should be done in
steps with waiting for the appropriate reaction of the drive (e.g. axis 1):
COB-ID Data Comment
201 06 00 Shutdown command
181 31 02 State Ready_to_switch_on
201 07 00 Switch_on command
181 33 02 State Switched_on
201 0F 00 Enable_operation command
181 37 02 State Operation_enabled
201 1F 00 Enable IP-mode
181 37 12 IP-mode enable
AKD User Guide |
Kollmorgen | December 2010 148
 Loading...
Loading...









