21.4.12.2 Mailbox Input
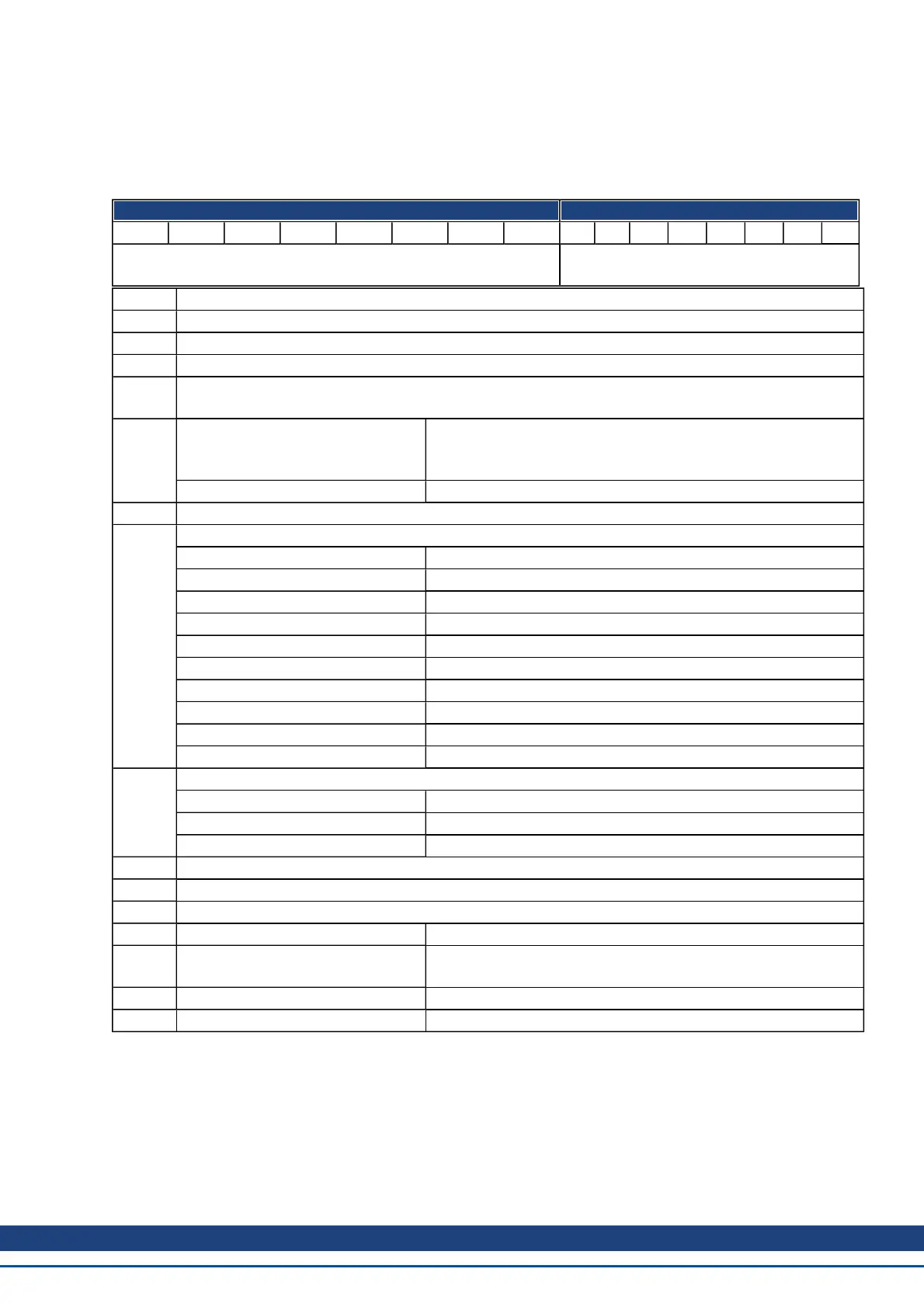
The drive answers every CoE telegram with a 16 byte answer telegram in the Mailbox Input buffer. The bytes are
defined as follows:
Address 0x1C00 Address 0x1C0F
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
CAN over EtherCAT specific data
(CoE Header)
CAN specific data
(standard CAN SDO)
Byte 0 Length of the data (Low Byte)
Byte 1 Length of the data (High Byte)
Byte 2 Address (Low Byte)
Byte 3 Address (High Byte)
Byte 4 Bit 0 to 5: Channel
Bit 6 to 7: Priority
Byte 5 Bit 0 to 3: Type 1 = Reserved: ADS over EtherCAT
2 = Reserved: Ethernet over EtherCAT
3 = Can over EtherCAT…)
Bit 4 to 7: Reserved
Byte 6 PDO Number (with PDO transmissions only, Bit 0 = LSB of the PDO number, see Byte 7 for MSB)
Byte 7 Bit 0: MSB of the PDO number, see Byte 6
Bit 1 to 3: Reserved
Bit 4 to 7: CoE specific type 0: Reserved
1: Emergency message
2: SDO request
3: SDO answer
4: TXPDO
5: RxPDO
6: Remote transmission request of a TxPDO
7: Remote transmission request of a RxPDO
8…15: reserved
Byte 8 Control-Byte in the CAN telegram:
write access OK: 0x60
read access OK + length of answer: 0x43 (4 Byte), 0x47 (3 Byte), 0x4B (2Byte), 0x4F (1Byte)
error with read- or write access: 0x80
Byte 9 Low Byte of the CAN object number (Index)
Byte 10 High Byte of the CAN object number (Index)
Byte 11 Subindex according to CANopen Specification for Kollmorgen drive
Byte 12 Data (Low Byte)
Byte 13 Data error code Fehlercode according to CANopen Specification in
case of an error
Byte 14 Data data value of the object in case of successfull read access
Byte 15 Data (High Byte)
AKD User Guide |
Kollmorgen | December 2010 60

 Loading...
Loading...






