AKD User Guide | 16 Using Parameters and the Terminal Screen
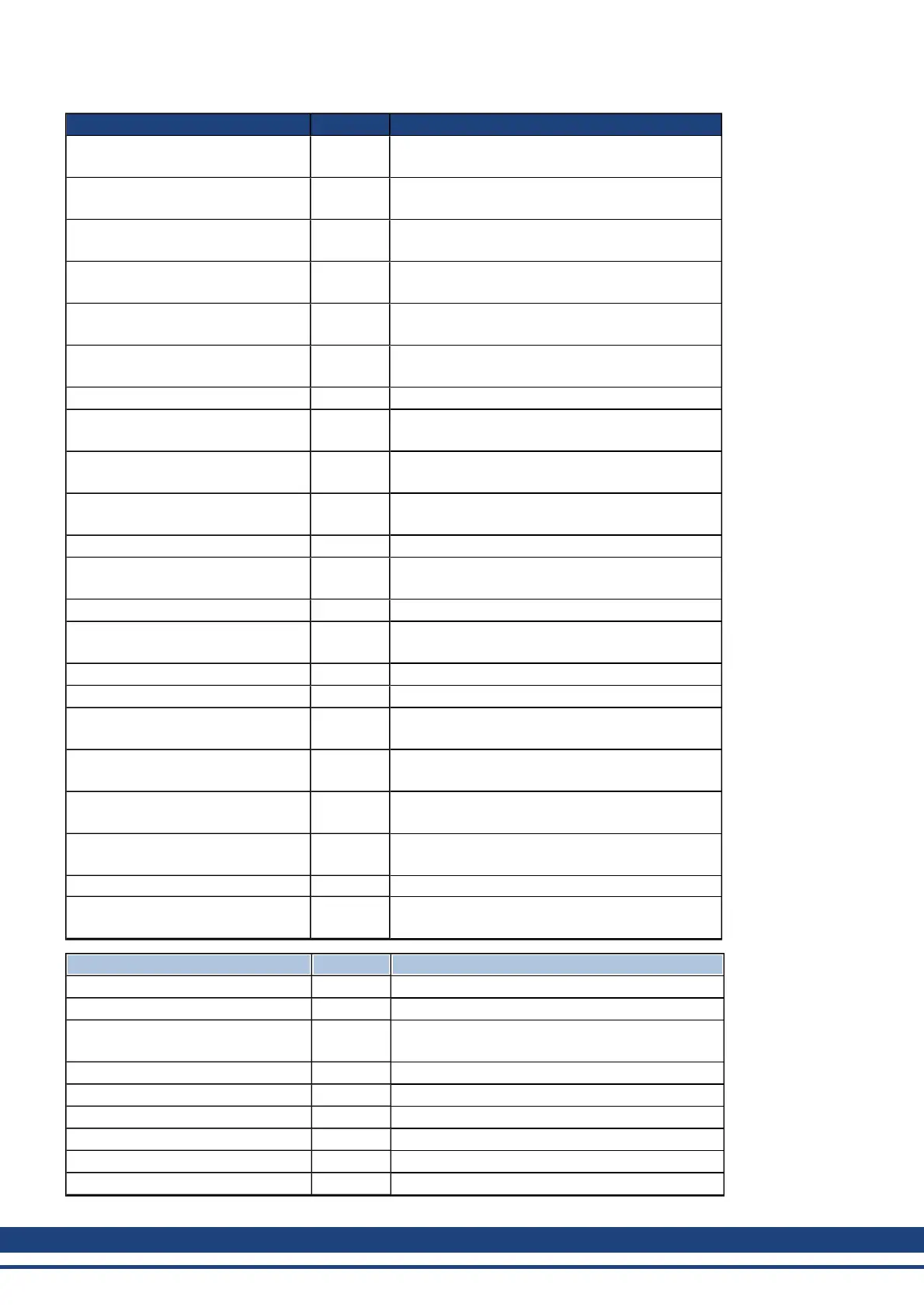
Parameter or Command Type Description
IL.INTEN (Password Protected) NV
Enables/disables the integrator part of the PI
loop.
IL.IUOFFSET (Password Pro-
tected)
R/W
Sets the offset added to the sigma-delta meas-
ured current value in the u-winding.
IL.IUFB R/O
Reads the sigma-delta measured current in the u-
winding of the motor.
IL.IVFB R/W
Sets the sigma-delta measured current in the u-
winding of the motor.
IL.IVOFFSET (Password Pro-
tected)
R/W
Sets the offset added to the sigma-delta meas-
ured current value in the v-winding.
IL.KP NV
Sets the proportional gain of the q-component of
the PI regulator.
IL.KPDRATIO NV IL.KPDRATIO
IL.LIMITN NV
Sets the negative user (application-specific) cur-
rent limit.
IL.LIMITP NV
Sets the positive user (application-specific) cur-
rent limit.
IL.MFOLDD NV
Sets the motor foldback maximum time at motor
peak current.
IL.MFOLDR R/O Sets the motor foldback recovery time.
IL.MFOLDT NV
Sets the motor foldback time constant of the
exponential current drop (foldback).
IL.MIFOLD R/O Sets the motor foldback current limit.
IL.PWMFREQ (Password Pro-
tected)
NV
Reads and sets the PWM frequency of the
IGBTs.
IL.VDCMD R/O Sets the output of the d-component PI-regulator.
IL.VCMD R/O Sets the output of the q-component PI regulator.
IL.VUFB R/O
Reads the measured voltage on the u-winding of
the motor.
IL.VVFB R/O
Reads the measured voltage on the v-winding of
the motor.
IL.DLIMITN R/W
Sets the negative user (application-specific) d-
component current limit.
IL.DLIMITP R/W
Sets the positive user (application-specific) d-
component current limit.
IL.FB R/O
Reads the actual value of the d-component cur-
rent.
Motor (MOTOR) Parameters
MOTOR.BRAKE NV Sets the presence or absence of a motor brake.
MOTOR.TBRAKEAPP NV The delay time used for applying the motor brake.
MOTOR.TBRAKERLS NV
The delay time used for releasing the motor
brake.
MOTOR.ICONT NV Sets the motor continuous current.
MOTOR.INERTIA NV Sets the motor inertia.
MOTOR.IPEAK NV Sets the motor peak current.
MOTOR.KT NV Sets the torque constant of the motor.
MOTOR.LQLL NV Sets the line-to-line motor Lq.
MOTOR.VMAX NV Sets the maximum motor speed.
202 Kollmorgen | December 2010

 Loading...
Loading...






