21.4.3 Phase Run-Up
The AL control, AL status and AL status code registers are responsible for communication phase run-up (also
referred to as EtherCAT status change), for current status display and for any fault messages. The drive
responds to every EtherCAT interface transition request made by the AL control register via the AL Status and
AL Status Code registers. Any fault messages are displayed in the AL status code register.
A status change within the AL control register is polled within the AKD, which means that an AL control event
does not lead to a HW interrupt within the drive.
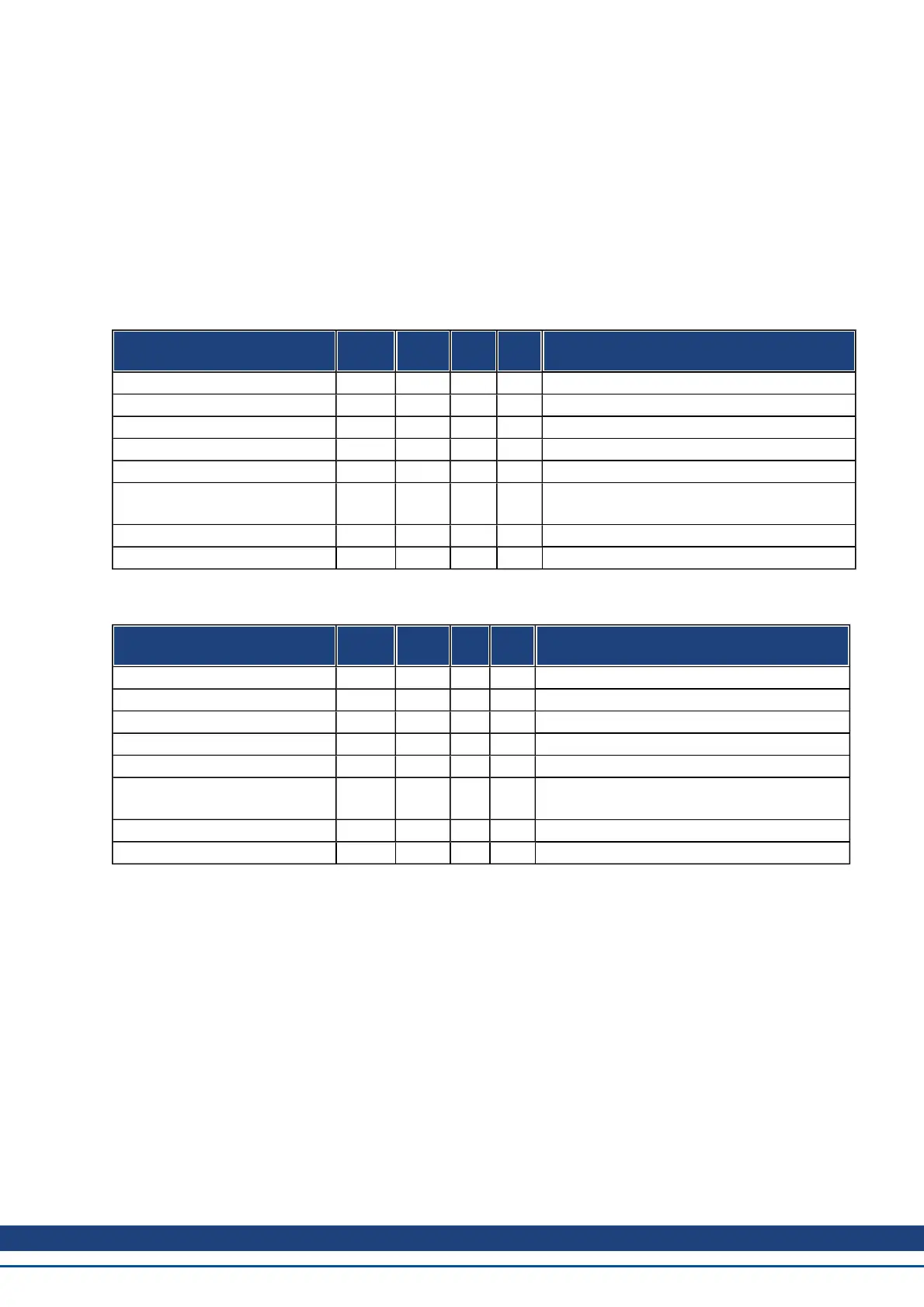
21.4.3.1 AL Control (Address 0x0120:0x0121)
Parameter Address Bit
ZA
Drive
ZA
ECAT Description
Status 0x120 3 to 0 R/O W/O 0x01: Init Request
0x02: PreOperational Request
0x03: Bootstrap Mode Request
0x04: Safe Operational Request
0x08: Operational Request
Acknowledgement 0x120 4 R/O W/O 0x00: No fault acknowledgement
0x01: Fault acknowledgement (positive edge)
Reserved 0x120 7 to 5 R/O W/O -
Applic. specific 0x120 15 to 8 R/O W/O -
21.4.3.2 AL Status (Address 0x0130:0x0131)
Parameter Address Bit
ZA
Drive
ZA
ECAT Description
Status 0x130 3 to 0 W/O R/O 0x01: Init
0x02: PreOperational
0x03: Bootstrap Mode
0x04: Safe Operational
0x08: Operational
Status change 0x130 4 W/O R/O 0x00: Acknowledgement
0x01: Error, e.g. forbidden transition
Reserved 0x130 7 to 5 W/O R/O -
Applic. specific 0x130 15 to 8 W/O R/O -
AKD User Guide |
Kollmorgen | December 2010 48

 Loading...
Loading...






