8400 HighLine | Parameter setting & configuration
Motor control (MCTRL)
Sensorless vector control (SLVC)
142 L Firmware ≤ 05.00 - DMS 4.2 EN - 02/2010
Tip!
For applications with high dynamic performance and speed/torque accuracy
requirements in the field weakening range, we recommend a time constant
Ti ≤ 15 ms.
In this case, the maximum torque should be limited via the nTorqueMotLimit_a
and nTorqueGenLimit_a process input signals to 1.5 x M
N
to ensure stable
operation in the field weakening range.
5.6.3.4 Optimise response to setpoint changes and determine mass inertia
Setting the total moment of inertia under C00273
provides the optimum torque
feedforward control. Depending on the application, an adjustment of the setting under
C00273
may be necessary to optimise the response to position/speed setpoint changes by
means of the torque feedforward control.
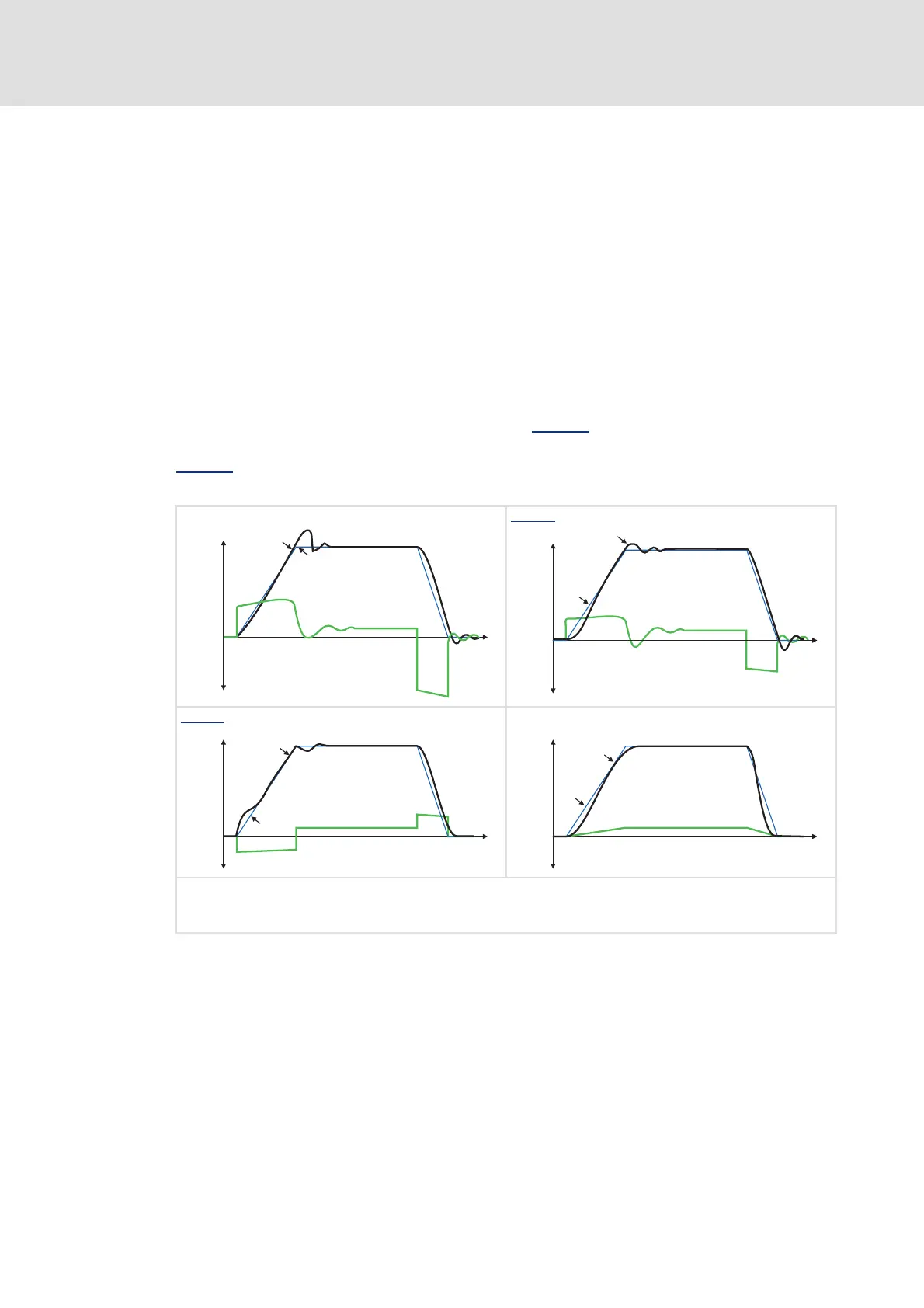
[5-15] Typical signal characteristics for different settings of the load moment of inertia
Without feedforward control: C00273 set too low:
C00273
set too high: Optimum feedforward control:
n Actual speed value (nMotorSpeedAct_a signal)
o Speed setpoint (nSpeedSetValue_a signal)
p Speed controller output (nOutputSpeedCtrl_a signal)
n,M
t
t
n,M
t
n,M
t
n,M
efesotomasyon.com - Lenze
 Loading...
Loading...