Firmware ≤ 05.00 - DMS 4.2 EN - 02/2010 L 433
8400 HighLine | Parameter setting & configuration
Basic drive functions (MCK)
Override
8.11 Override
An "Override" is the change of profile parameters and their acceptance during the
positioning process.
In this case the traversing profile has to be adapted accordingly, so that positioning is
carried out exactly to the target position defined, even if for example a change in speed
occurs during the positioning process ("Speed override"):
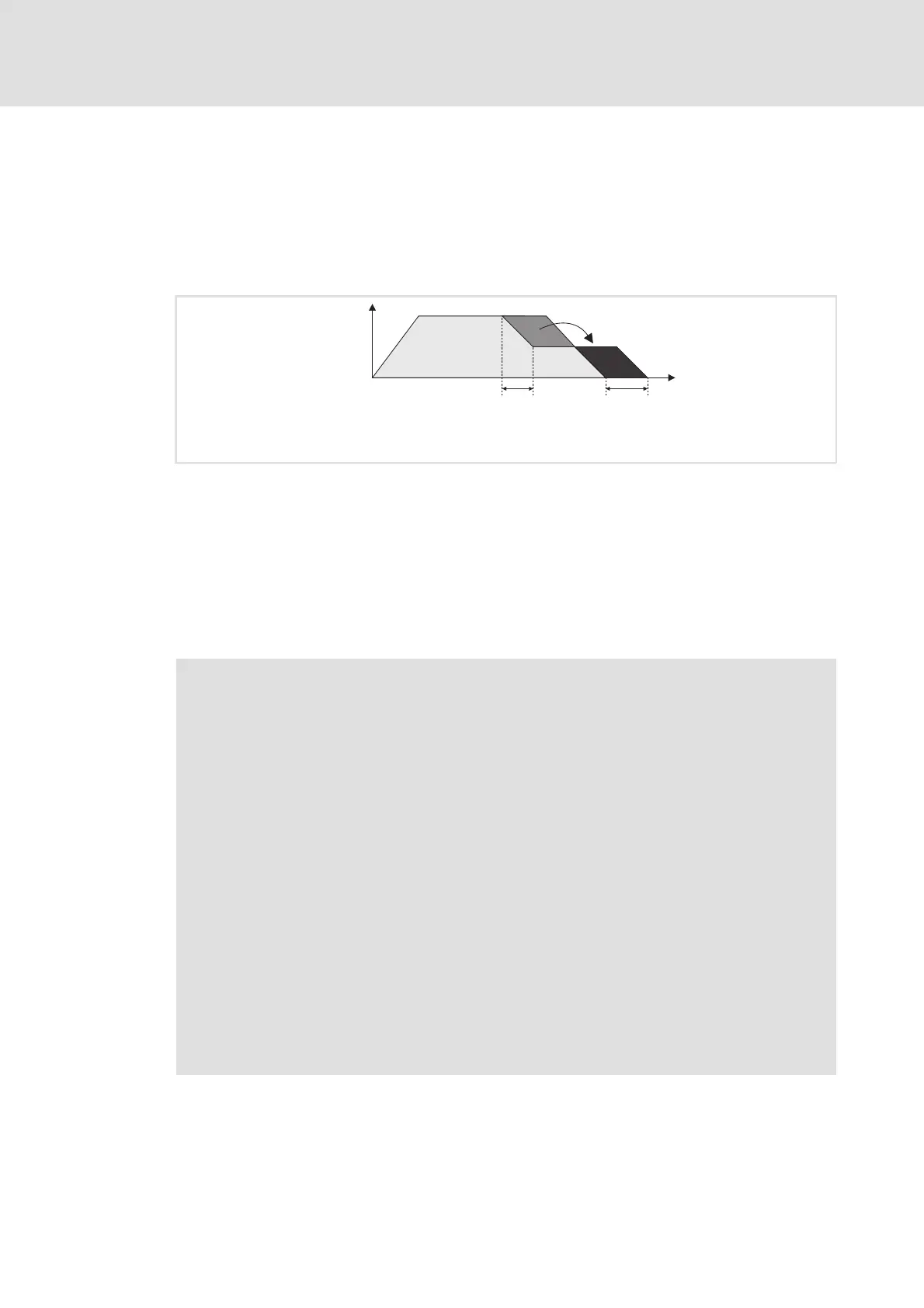
[8.4] Override (here: speed override)
The override for speed, acceleration, and S-ramp time affects all motion profiles that
are controlled by the internal profile generator:
–Manual jog
– Retracting from limit switches
–Homing
– Point-to-point positioning
n Speed is reduced during the positioning process.
o In order to reach the position defined, the missing area has to be "attached" to the profile.
p Due to the speed reduction the positioning process takes longer (Δt).
v [m/s]
Dt
t [s]
Note!
The online change of speed and acceleration is in effect from the start of the
profile until the deceleration phase begins. Changing the deceleration phase by
means of an override is therefore not possible!
• In the case of an override value of 0 % for the speed, the drive is brought to a
standstill.
• In the case of an override value of 0 % for the acceleration, acceleration does
not take place any longer.
The acceleration override also has the same effect on the deceleration ramp to
the same extent specified, but only until the deceleration phase is initiated.
The override has no impact on:
• The "speed follower" operating mode
• Synchronising processes
• Setpoint controls via external setpoints
• Abort via input bPosStop
• Speed setpoint selection in case of error (e. g. "Fail-QSP")
efesotomasyon.com - Lenze
 Loading...
Loading...