8400 HighLine | Parameter setting & configuration
Basic drive functions (MCK)
Positioning
422 L Firmware ≤ 05.00 - DMS 4.2 EN - 02/2010
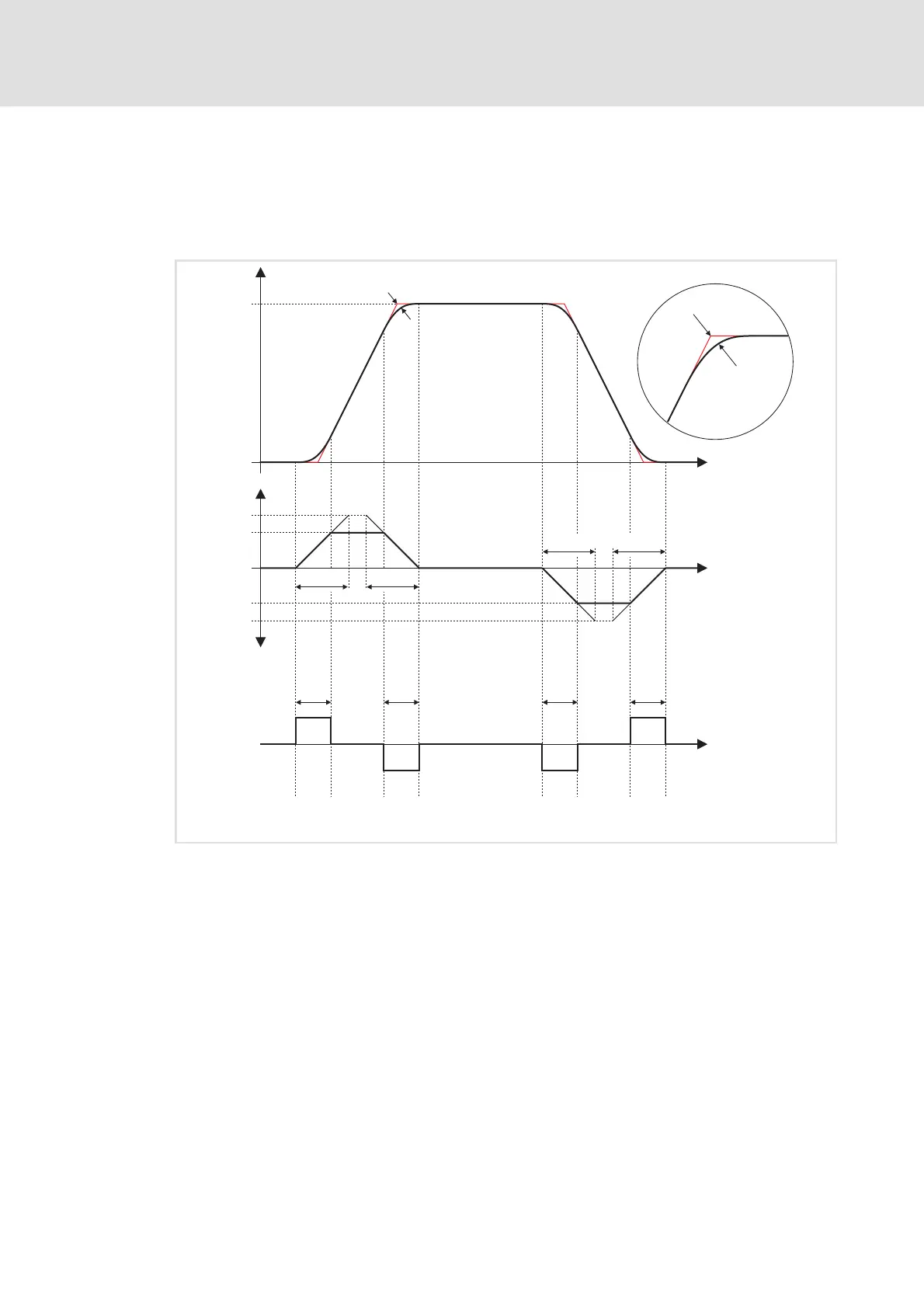
8.8.2.4 S-ramp time for jerk limitation
The maximum jerk is defined by the selection of an S-ramp time t
jerk_max
, after which the
max. acceleration (a
max
) only is reached.
The actual jerk time t
jerk
is reduced according to the actual acceleration Acc:
n Without jerk limitation
o With jerk limitation
1. Standstill
2. Acceleration with set jerk limitation 6. Deceleration with set jerk limitation
3. Acceleration according to acceleration profile (Acc) 7. Deceleration according to deceleration profile
(Dec)
4. Reduce acceleration (jerk limitation) 8. Reduce deceleration (jerk limitation)
5. Traversing with Vel according to speed profile 9. Standstill (position target reached)
V
t
t
a
t
Jerk
12 3 4 5 6 7 89
Vel
Acc
Dec
a
max
a
max
t
t
jerk_max
t
jerk_max
t
jerk_max
t
jerk_max
jerk
t
jerk jerk
tt
jerk
efesotomasyon.com - Lenze
 Loading...
Loading...