8400 HighLine | Parameter setting & configuration
Motor control (MCTRL)
Sensorless vector control (SLVC)
144 L Firmware ≤ 05.00 - DMS 4.2 EN - 02/2010
5.6.4 Remedies for undesired drive behaviour
Drive behaviour Remedy
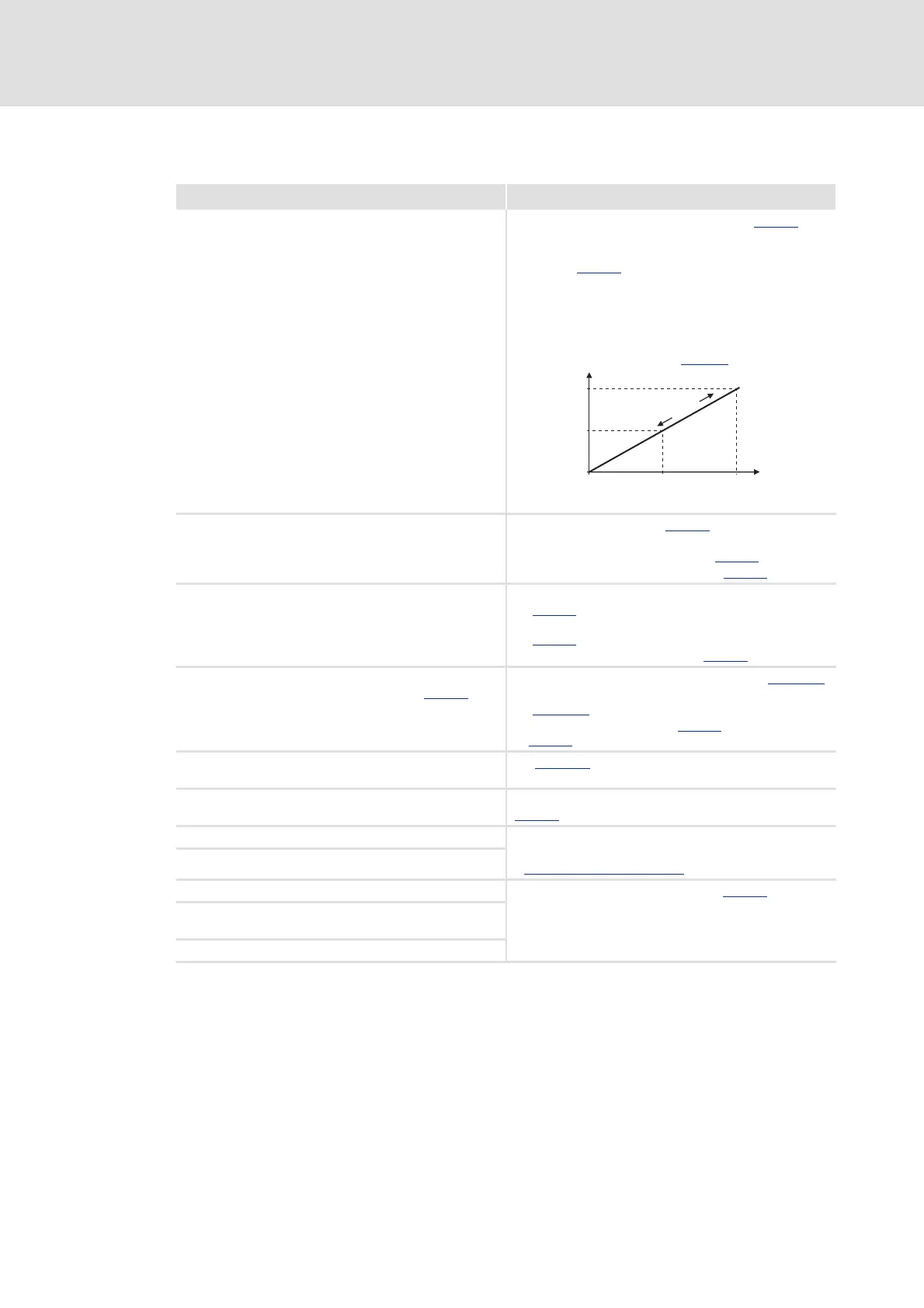
Deviation between no-load current and magnetising
current or bad speed or torque accuracy.
Adapt the motor magnetising inductance (C00092
) for
no-load operation.
• If the no-load current is greater than the magnetising
current (C00095
) at 0.5-fold rated motor speed, the
magnetising inductance must be reduced until the
no-load current and the magnetising current have the
same values.
• Otherwise, the magnetising inductance must be
increased.
Tendency of the correction of C00092:
PN: Rated motor power
Insufficient speed constancy at high load: Setpoint and
motor speed are not proportional anymore.
Caution: Overcompensation of the settings mentioned
under " Remedy" may result in unstable behaviour!
Via the slip compensation (C00021
), the speed stability
under high loads can be affected:
•If n
act
> n
slip
, reduce the value in C00021
•If n
act
< n
slip
, increase the value in C00021
Unstable control with higher speeds. • Check the setting of the magnetising inductance
(C00092
) by comparing the current consumption in
no-load operation with the rated magnetising current
(C00095
).
• Optimise oscillation damping (C00234
).
"Short circuit" (OC1) or "Clamp operation active" (OC11)
error messages at short acceleration time (C00012
) in
proportion to the load (controller cannot follow the
dynamic processes).
• Increase the gain of the torque controller (C00073/2
).
• Reduce the reset time of the torque controller
(C00074/2
).
• Increase the acceleration (C00012
)/deceleration (
C00013
) time.
Mechanical resonance at certain speeds. The L_NSet_1
function block masks out those speed
ranges that include resonance.
Speed variations in no-load operation for speeds > 1/3
rated speed.
Minimise speed oscillations with oscillation damping
(C00234
).
Drive runs unstable. Check set motor data (nameplate data and equivalent
circuit diagram data).
Motor selection/Motor data
( 97)
Setpoint speed and actual speed differ strongly.
The torque required is not generated at standstill. Increase motor magnetising current (C00095).
Current overshoots occur when heavy loads are
accelerated from standstill (OC1 or OC11 error).
The machine runs uneven.
0,37
22
90
C0092
-15 %
+15 %
0
P [kW]
N
efesotomasyon.com - Lenze
 Loading...
Loading...